- What programming language is Kawasaki using?
- Jump to the most helpful post
- kawasaki Robot AS Reference Manual
- Язык программирования as kawasaki
- Kawasaki AS Language Support for VSCode
- Features
- Syntax Highlighting
- Code Snippets
- Code Formatting
- Auto Formatter
- Jump to Definition
- Custom Sidebar
- Program tree
- Copy program to clipboard
- Installation
- Usage
- Contributing
- License
- Язык программирования as kawasaki
What programming language is Kawasaki using?
The language seems familiar, but is it Java, C++ or something else ?
I’m new to Kawasaki and not used to text programming
Jump to the most helpful post
AS language: you need a manual.
There are a bunch of «constructions» similar to java or c++, but all the language is based on robots needs.
In Kawasaki there are 2 formats of programs:
— This is done using ONLY Teach Pendant, as it is Teach Pendant Programming.
2. AS Language Programming
— This is advanced level programming language, having specific functions including repetitive functions
(FOR, WHILE, IF, IF CASE, DO UNTIL)
If you are familiar with a certain programming language, you need only to learn the syntax
90209-1022DEC_E-Series-AS-Language_Reference_Manual should be good for the programming part.
The reason i’m asking is that when looking in the manuel, sometimes i need another or more examples. So i figured, that if the language is common, i could find help other places than the manual.
The manual doesn’t always specify in details what should be written in exact terms. And when googling, all results is to this page
I believe ‘back in the day’, Kawasaki AS Programming Language is based on the earlier VAL programming language developed and used for PUMA robots in the Unimation days (way before my time).
There’s a lot of history behind PUMA and VAL which links to a couple of Robot OEM’s today, to name a couple:
— Kawasaki (They refer to it as AS Language).
— Staubli (I think they still refer to it as VAL).
However, you can appreciate that Robot OEM’s have added further commands/syntax since it’s development, therefore studying their documentation will provide you with more current, applicable instructions.
Most basic commands do have annotated examples, but as it is language based, you will find you can create your iterations in which these examples would obviously not be annotated, so studying the associated manuals or going on an AS Training course would certainly be of benefit.
This makes it a very flexible and powerful programming language where you can combine commands.
As already the mentioned, the convention to program used purely via the Teach Pendant is known as BLOCK and is proprietary to Kawasaki products, which provides a very ‘rigid’ programming structure intended to be created using the Teach Pendant only.
You can visit me directly for business related services at Industrial Robotics Consultancy Ltd
(Please note I am based in the UK)
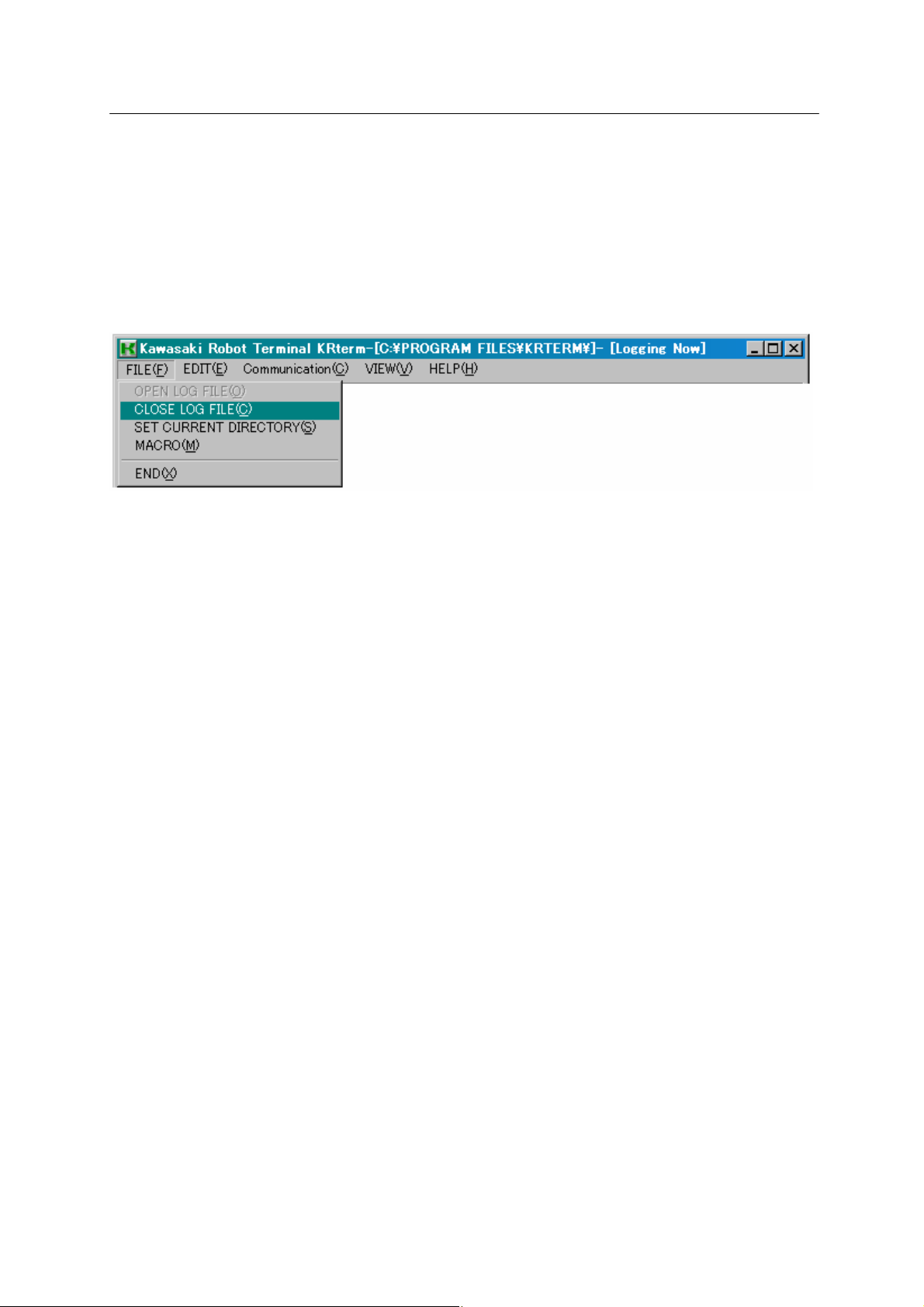
kawasaki Robot AS Reference Manual
The items that require special attention in this manual are des ignated with th e following sym bols.









It is set prior to shipment from the factory. (This is a default se tting that function as a software












In contrast with the global vari ables above, local variables are re defined each time the program is
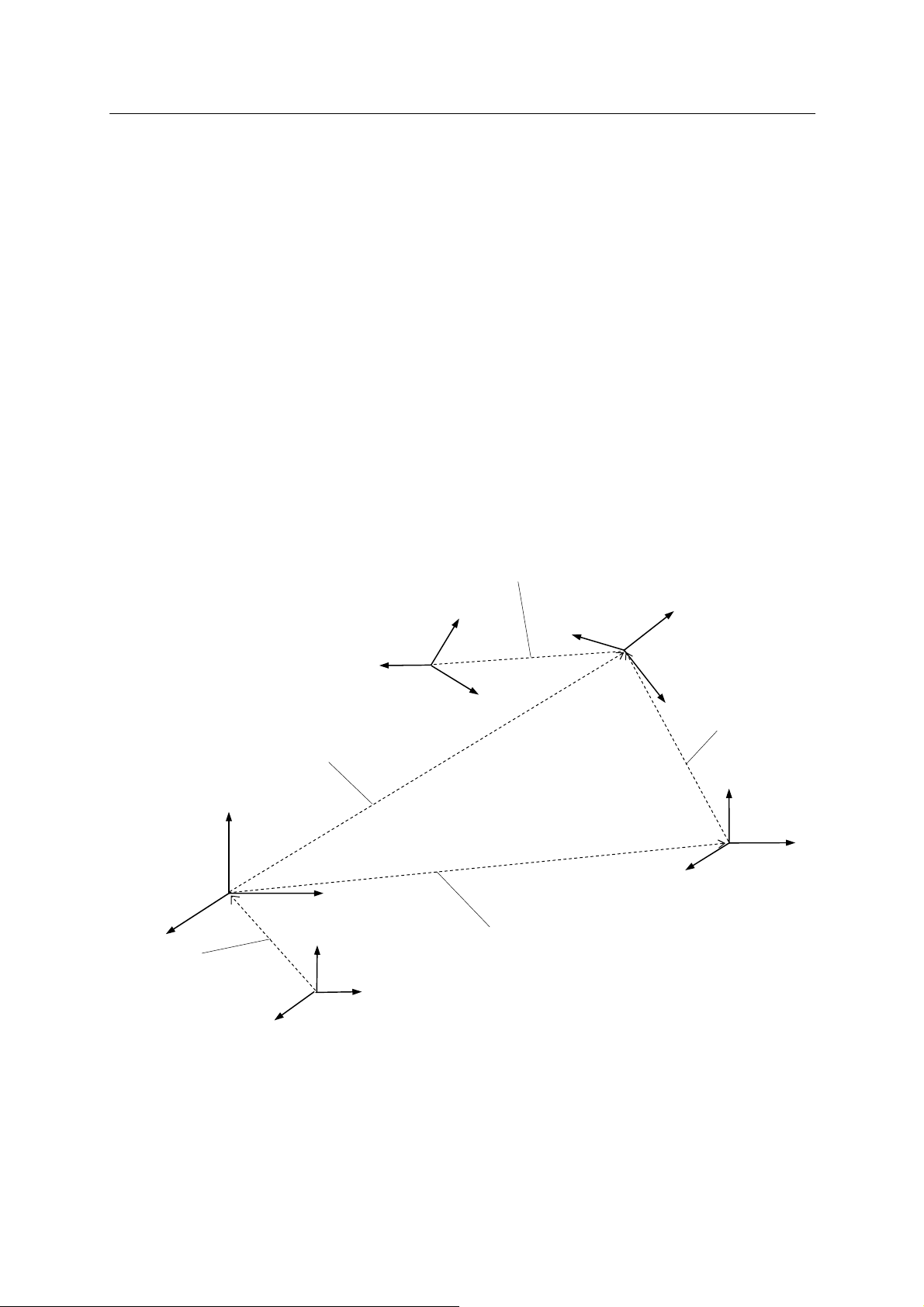
For example, say that “plate” is the name of the variable for the transf ormation valu es relative to
The transformation value “object” no w defines the current pose relative to plate* (If “plate” is not
If the robot is to pick up the obj ect at the pose specified as “pick up” defined relative to “object”,

The variable on the left side may be either a scalar variable (i.e., count) or an array element (i.e.,
If the variable on the left side of the instruction is a new one an d has never been assigned a value
before, the value on the right is assi gned to that variable automatically. If the left side variable is
For example, the instruction “x=3” as signs the value 3 to the variable “x”. It is read, “assign 3 to
If this example is a math equation, it is read “x is equa l to x plus 1”, which doe s not make sense.
Язык программирования as kawasaki
ХАРАКТЕРИСТИКИ AS СИСТЕМЫ
В AS системе роботы управляются и функционируют, основываясь на программе, которая создается до выполнения действий и описывает последовательность действий, необходимых для решения поставленной задачи. (Обучение методом воспроизведения).
AS язык программирования разделяется на два вида: мониторные команды и программные инструкции
Мониторные команды используются для написания, редактирования, выполнения программ и единичных команд. Они вводятся после знака (>), появляющегося в начале строки и выполняются после нажатия клавиши (Enter) немедленно. Некоторые мониторные команды используются внутри программы, как программные инструкции.
Программные инструкции используются для создания последовательности движения робота, для контроля и управления внешними сигналами и т.д. в программах. Программа есть совокупность программных инструкций. В данном руководстве мониторные команды называются команды, программные инструкции называются инструкциями.
AS уникальна по следующим причинам:
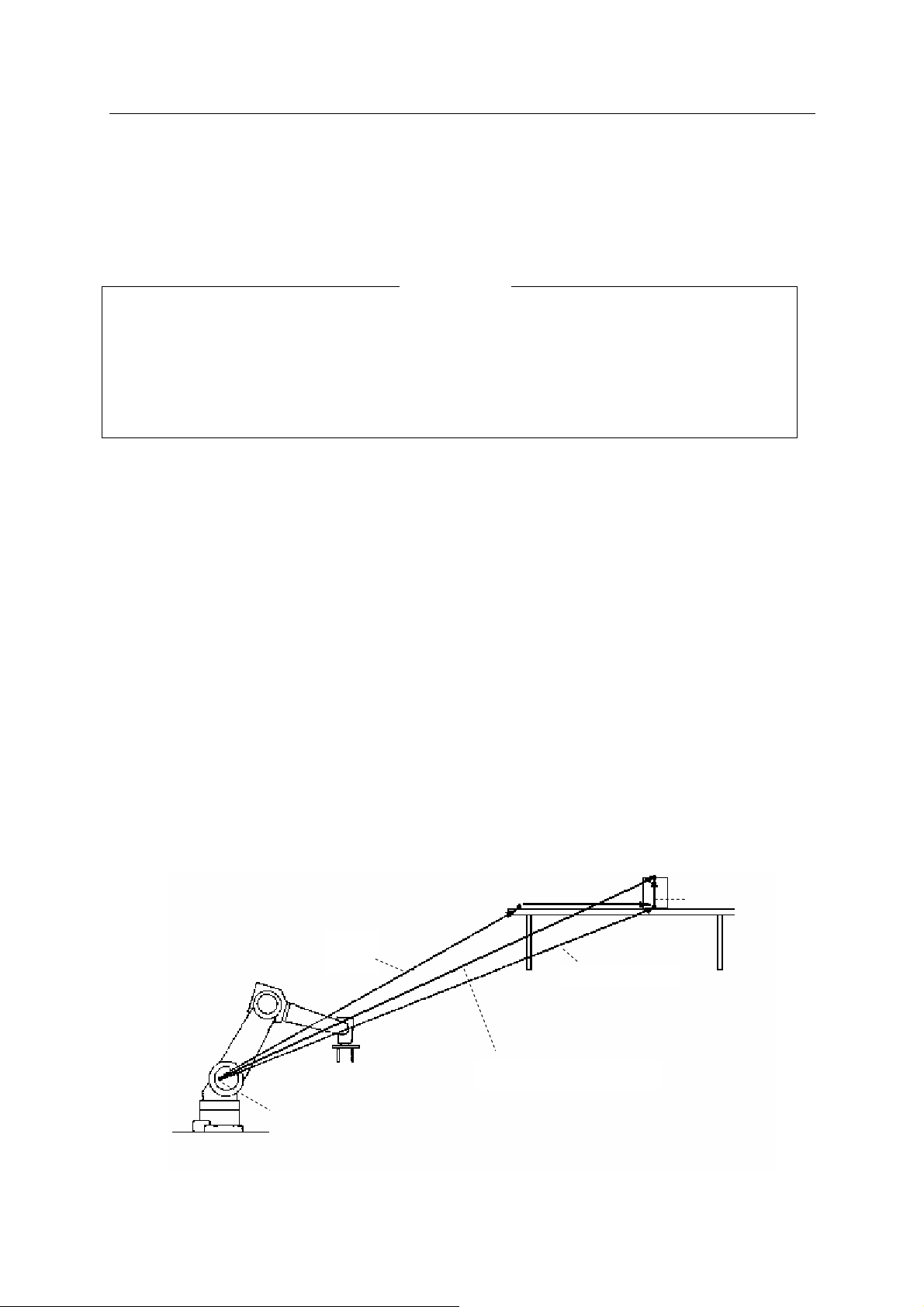
- Робот может двигаться непрерывно вдоль заданной траектории (СР движение: непрерывное движение).
- Две координатные системы, базовая система координат и инструментальная система координат, обеспечивающие более точное управление перемещениями робота.
- Координаты могут быть смещены и повернуты в соответствии с изменением положения детали.
- При обучении позициям или повторения действий робот может идти по линейной траектории, сохраняя положение инструмента неизменным
- Программы могут именоваться свободно и запоминаться без ограничений.
- Каждая операционная единица может быть задана как программа, и эти программы могут быть скомбинированы в один комплекс (подпрограмма).
- При помощи контроля сигналов программы могут быть прерваны, и начато выполнение других программ с временной приостановкой текущего движения, когда происходит вход внешнего сигнала (прерывание).
- Программы управления производственным процессом (РС программы) могут выполняться одновременно с управляющими программами робота.
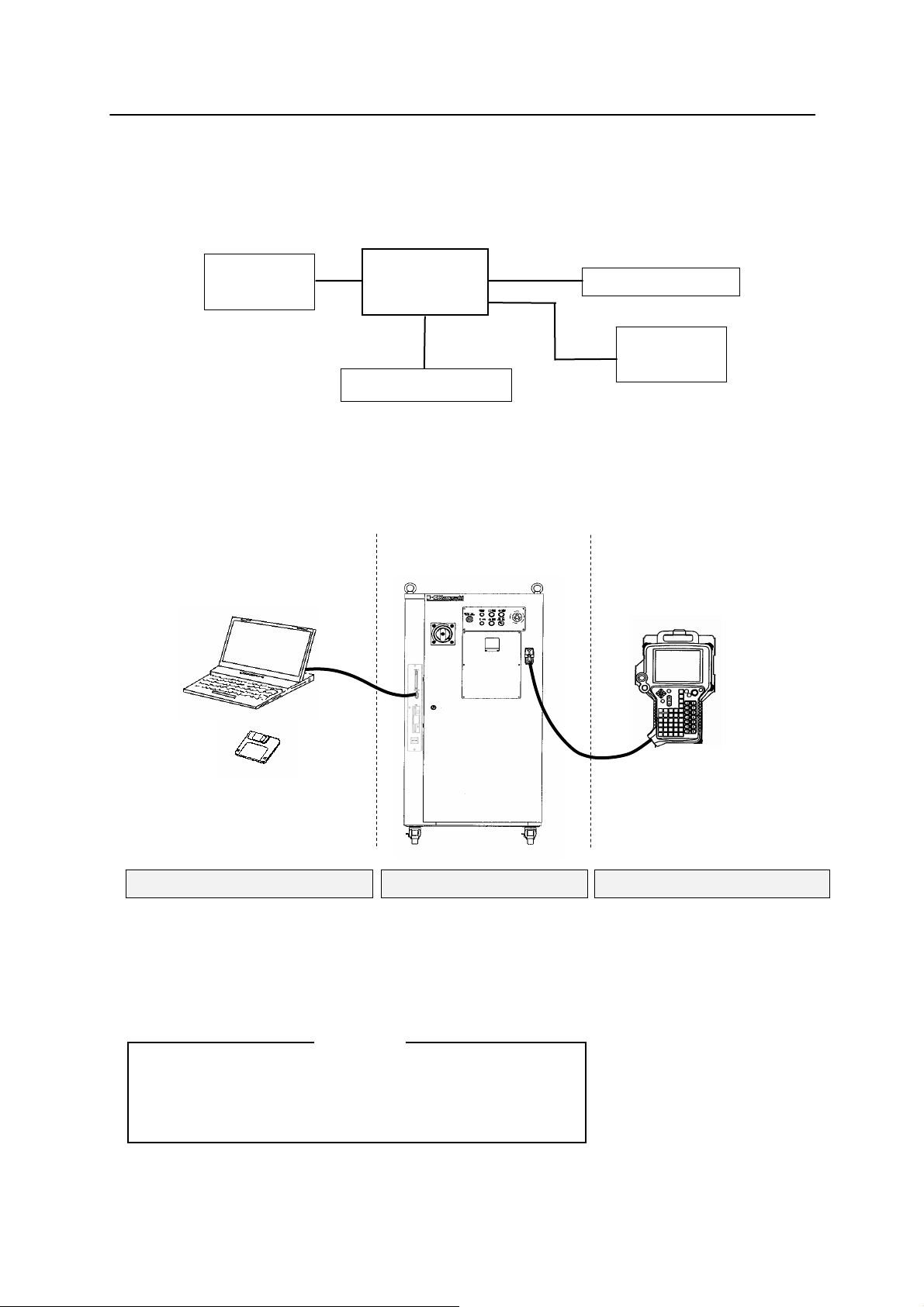
- Программы и данные позиций могут отображаться на дисплее и записываться на внешний носитель памяти, например на РС карту.
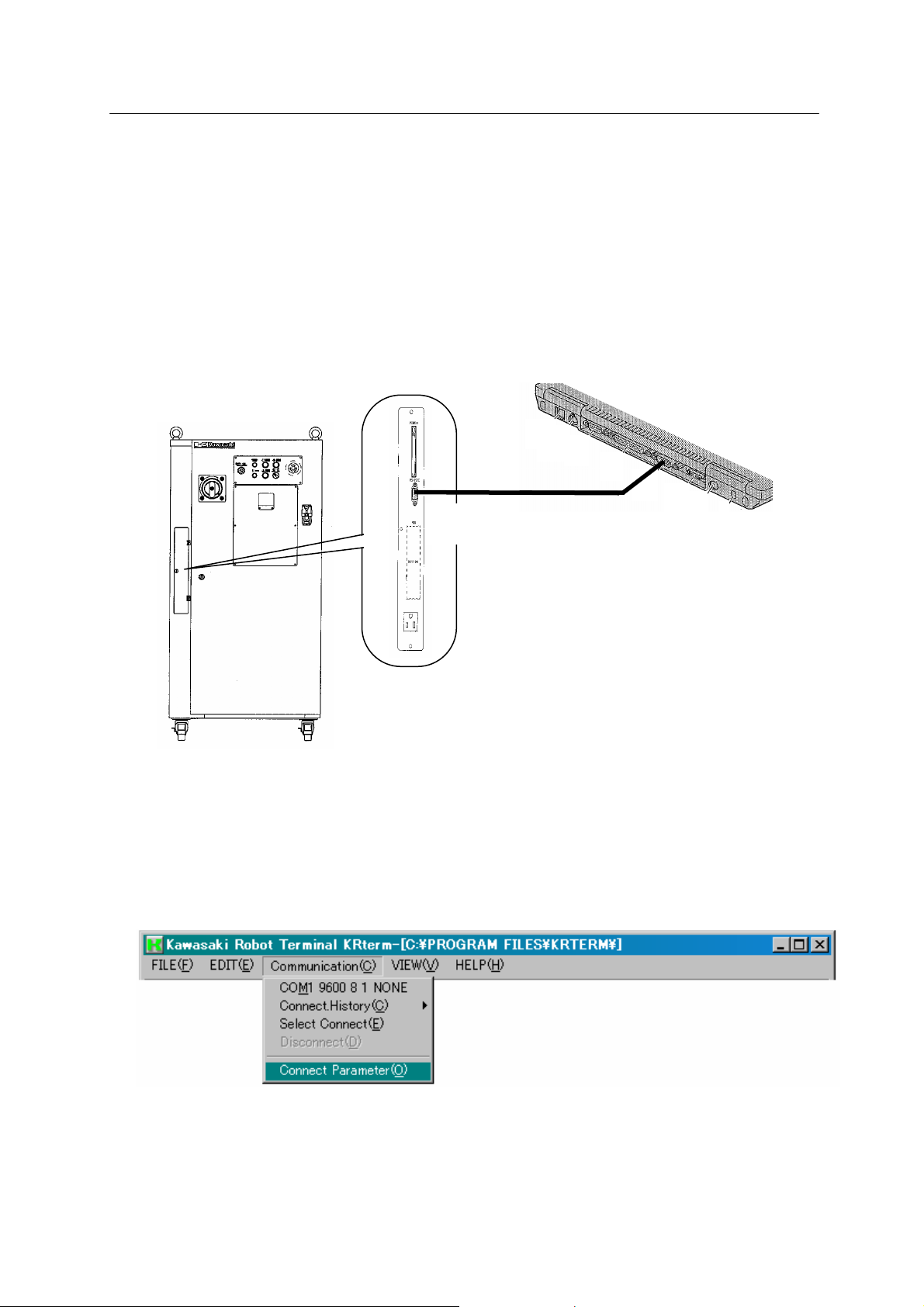
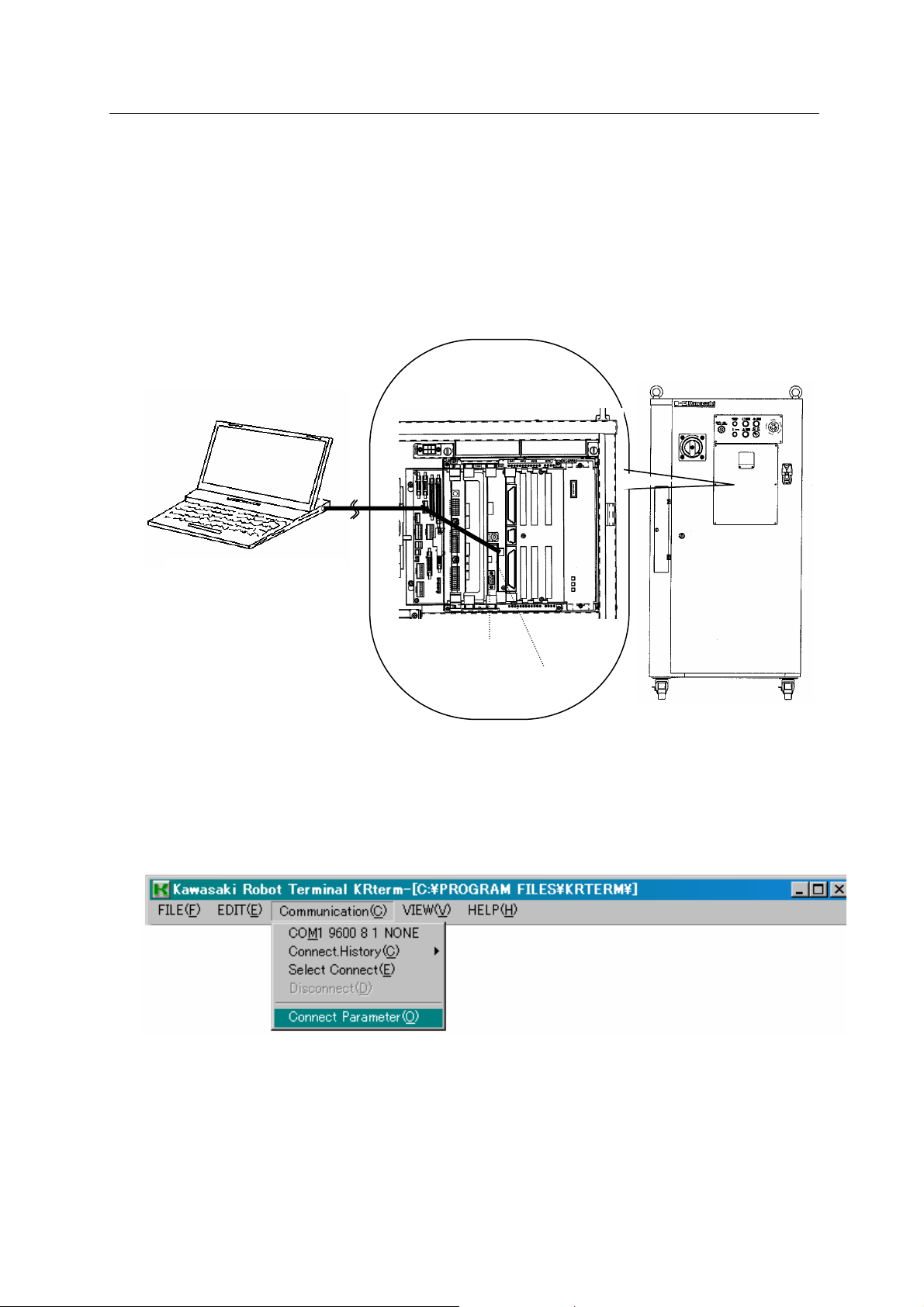
- Программирование может быть осуществлено при помощи персонального компьютера, подключенного к контроллеру (автономное программирование).
Kawasaki AS Language Support for VSCode
![]()
![]()
This VSCode extension provides language support for Kawasaki AS programming language, offering a range of features to enhance your development experience.
Features
Syntax Highlighting
The extension provides syntax highlighting for Kawasaki AS code, making it easier to read and understand. It provides different dark and light theme colors, automatically chosen depending on user selected VSCode Theme. 

Code Snippets
Access a collection of code snippets specific to Kawasaki AS language. Snippets include descriptions and comments to help you understand their usage. Quick access via ctrl + space key shortcut. Accept snippets by pressing tab or Enter .
Code Formatting
Automatically format your Kawasaki AS code according to a consistent style to improve code readability and maintainability, while writing.
Auto Formatter
Automatically format your Kawasaki AS code on save or by right click command, ensuring consistent formatting throughout your project.
Jump to Definition
Quickly navigate to the definition of a program or a GOTO label in your Kawasaki AS codebase with a ctrl + click .
Custom Sidebar
Program tree
Get a quick tree view of the project programs in the sidebar, allowing you to easily navigate and switch between different programs in your project.
Copy program to clipboard
A button next to each program on the project makes it possible to copy the desired program to clipboard with a single click.
Installation
- Launch Visual Studio Code.
- Go to the Extensions view by clicking on the square icon in the left sidebar or pressing Ctrl+Shift+X .
- Search for Kawasaki AS Language by dRamosCode and click Install.
- Once installed, you can start using the extension in your Kawasaki AS projects.
Usage
- Open a Kawasaki AS file (with a .as extension) in Visual Studio Code.
- Enjoy the syntax highlighting, code formatting, and other features provided by the extension.
- Use the code snippets to quickly insert commonly used code patterns.
- Navigate to definitions by pressing the ctrl key and clicking on a program or GOTO label.
- Use the custom sidebar to explore and switch between different programs in your Kawasaki AS project, and copy programs to clipboard.
Contributing
Contributions to the Kawasaki AS Language Extension are welcome! If you encounter any issues or have suggestions for improvements, please open an issue in the GitHub repository.
License
This extension is licensed under the MIT License.
Язык программирования as kawasaki

Пожалуйста, используйте этот идентификатор, чтобы цитировать или ссылаться на этот ресурс: https://elib.belstu.by/handle/123456789/21670
| Название: | Особенности программирования учебного стенда на базе промышленного робота Kawasaki FS 03N |
| Авторы: | Клютко, Михаил Викторович Карпович, Дмитрий Семенович Овцинов, И. А. Udris, Dainius |
| Ключевые слова: | программирование учебные стенды промышленные манипуляторы промышленные роботы программное обеспечение KCwinTCP языки программирования AS система KCwinTCP |
| Дата публикации: | 2017 |
| Издательство: | БГТУ |
| Библиографическое описание: | Особенности программирования учебного стенда на базе промышленного робота Kawasaki FS 03N / М. В. Клютко [и др.] // Химическая технология и техника : тезисы докладов 81-й научно-технической конференции профессорско-преподавательского состава, научных сотрудников и аспирантов (с международным участием), Минск, 1-12 февраля 2017 г. / Белорусский государственный технологический университет. — Минск : БГТУ, 2017. — С. 92. |
| URI (Унифицированный идентификатор ресурса): | https://elib.belstu.by/handle/123456789/21670 |
| Располагается в коллекциях: | Химическая технология и техника |
Все ресурсы в архиве электронных ресурсов защищены авторским правом, все права сохранены.