Графический метод решения задачи линейного программирования.
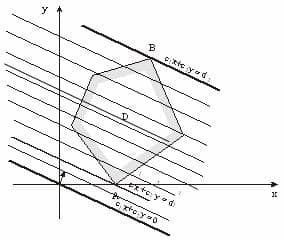
В линейном программировании используется графический метод, с помощью которого определяют выпуклые множества (многогранник решений). Если основная задача линейного программирования имеет оптимальный план, то целевая функция принимает значение в одной из вершин многогранника решений (см. рисунок).
- На плоскости X10X2 строят прямые.
- Определяются полуплоскости.
- Определяют многоугольник решений;
- Строят вектор N(c1,c2), который указывает направление целевой функции;
- Передвигают прямую целевую функцию c1x2+ c2x2 = 0 в направлении вектора N до крайней точки многоугольника решений.
Вычисляют координаты точки и значение целевой функции в этой точке.
Алгоритмический метод.
Для усвоения симплексного метода, а также других алгоритмов, рассмотренных в последующих главах, полезно иметь представление о некоторых основных моментах, учитываемых при использовании любой вычислительной процедуры. Оценивая тот или иной вычислительный алгоритм, необходимо, в частности, рассмотреть следующие его характеристики:
Рассмотренные выше методы служат для сбора информации о субъекте труда или профессиональной среде. Вместе с тем существует ряд методов упорядочения полученной информации. Одним из таких методов является алгоритмический анализ. Алгоритм — строгая последовательность действий, которая неизбежно приводит к решению задачи определенного класса. Эта последовательность действий может иметь словесное описание, в котором представлены все элементарные действия и логические условия, определяющие порядок этих действий, а может быть описана в символической форме или в виде графика. Метод дает возможность представить совокупность действий в компактной форме и понять их закономерные связи. Благодаря своей полноценности, конкретности и систематичности алгоритмы позволяют постепенно проследить характер операций, выполняемых работниками, и установить те звенья процесса, в которых наиболее часты аварии и брак и которые необходимо рационализировать или автоматизировать в первую очередь, либо функции, требующие перераспределения или изменения.
Существуют также возможности применения алгоритмического подхода при изучении и распространении передового опыта, в процессе обучения рабочих и повышения их квалификации на производстве, для оценки рациональности размещения оборудования, для повышения качества нормирования труда и т. д.
Введение в симплексный алгоритм.
Для решения задач линейного программирования предложено немало различных алгоритмов. Однако наиболее эффективным среди них оказался алгоритм, рассмотренный ниже. При этом следует подчеркнуть, что при решении некоторых частных задач (как, например, задач, связанных с оптимизацией потоков в сетях) могут оказаться более эффективными другие алгоритмы.
Попытаемся ход рассуждений, который был в каком-то разделе учебника выше, описать словесно. Упомянутая модель содержит два уравнения. Пробные решения выбирались следующим образом: допускалось, что две переменные принимают некоторые положительные значения, а остальные переменные предполагались тождественно равными нулю. Стремясь к обобщению, можно предположить, что в тех случаях, когда модель содержит т уравнений, для построения пробных решений используются т переменных, принимающих некоторые положительные значения при нулевых значениях остальных переменных. Вначале допустим, что решение существует, причем оптимальное значение целевой функции конечно ). В этом случае вычислительная процедура будет выглядеть следующим образом:
Шаг 1. Выберем т переменных, задающих допустимое пробное решение. Исключим эти переменные из выражения для целевой функции.
Шаг 2. Проверим, нельзя ли за счет одной из переменных, приравненной вначале к нулю, улучшить значение целевой функции, придавая ей отличные от нуля (причем положительные) значения. Если это возможно, перейдем к шагу 3. В противном случае прекратим вычисления.
Шаг 3. Найдем предельное значение переменной, за счет которой можно улучшить значение целевой функции. Увеличение значения этой переменной допустимо до тех пор, пока одна из т переменных, вошедших в пробное решение, не обратится в нуль. Исключим из выражения для целевой функции только что упомянутую переменную и введем в пробное решение ту переменную, за счет которой результат может быть улучшен.
Шаг 4. Разрешим систему т уравнений относительно переменных, вошедших в новое пробное решение. Исключим эти переменные из выражения для целевой функции. Вернемся к шагу 2.
Важно отметить, что при однозначном понимании данного предписания предложенный алгоритм действительно приводит к оптимальному решению для любой модели линейного программирования за конечное число итераций. Такой способ решения задач линейного программирования часто называют симплексным алгоритмом.
Обратимся вначале к одной простой задаче, не имеющей никаких «аномалий», и попытаемся с ее помощью получить общее представление о симплексном методе. К более подробному анализу данного метода вернемся несколько позже.
Графический метод решения ЗЛП
В линейном программировании используется графический метод, с помощью которого определяют выпуклые множества (многогранник решений). Если основная задача линейного программирования имеет оптимальный план, то целевая функция принимает значение в одной из вершин многогранника решений (см. рисунок).
Инструкция . Выберите количество строк (количество ограничений). Если количество переменных больше двух, необходимо систему привести к СЗЛП (см. пример и пример №2). Если ограничение двойное, например, 1 ≤ x1 ≤ 4 , то оно разбивается на два: x1 ≥ 1 , x1 ≤ 4 (т.е. количество строк увеличивается на 1).
Построить область допустимого решения (ОДР) можно также с помощью этого сервиса.
Решение матричной игры
С помощью сервиса в онлайн режиме можно определить цену матричной игры (нижнюю и верхнюю границы), проверить наличие седловой точки, найти решение смешанной стратегии методами: минимакс, симплекс-метод, графический (геометрический) метод, методом Брауна.
- На плоскости X10X2 строят прямые.
- Определяются полуплоскости.
- Определяют многоугольник решений;
- Строят вектор N(c1,c2), который указывает направление целевой функции;
- Передвигают прямую целевую функцию c1x2 + c2x2 = 0 в направлении вектора N до крайней точки многоугольника решений.
- Вычисляют координаты точки и значение целевой функции в этой точке.
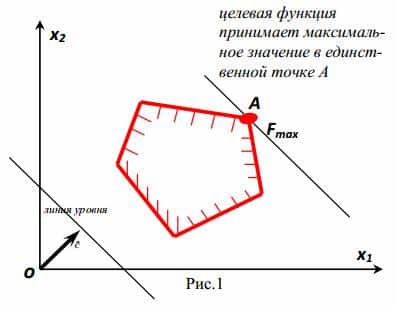
- Целевая функция принимает экстремальное (минимальное или максимальное) значение в единственной точке А.
- Сформулировать математическую модель задачи линейного программирования.
- Решить задачу линейного программирования графическим способом (для двух переменных).
Если количество переменных в задаче линейного программирования больше двух, то задачу предварительно сводят к стандартной ЗЛП.
F(X) = 3x1 — 2x2 + 5x3 — 4x5 → max при ограничениях:
x1 + x2 + x3=12
2x1 — x2 + x4=8
— 2x1 + 2x2 + x5=10
F(X) = 3x1 — 2x2 + 5x3 — 4x5
Переход к СЗЛП.
Расширенная матрица системы ограничений-равенств данной задачи:
| 1 | 1 | 1 | 0 | 0 | 12 |
| 2 | -1 | 0 | 1 | 0 | 8 |
| -2 | 2 | 0 | 0 | 1 | 10 |
Приведем систему к единичной матрице методом жордановских преобразований.
1. В качестве базовой переменной можно выбрать x3.
2. В качестве базовой переменной можно выбрать x4.
3. В качестве базовой переменной можно выбрать x5.
Поскольку в системе имеется единичная матрица, то в качестве базисных переменных принимаем X = (3,4,5).
Соответствующие уравнения имеют вид:
x1 + x2 + x3 = 12
2x1 — x2 + x4 = 8
— 2x1 + 2x2 + x5 = 10
Выразим базисные переменные через остальные:
x3 = — x1 — x2+12
x4 = — 2x1 + x2+8
x5 = 2x1 — 2x2+10
Подставим их в целевую функцию:
F(X) = 3x1 — 2x2 + 5(- x1 — x2+12) — 4(2x1 — 2x2+10)
или
F(X) = — 10x1 + x2+20 → max
Система неравенств:
— x1 — x2+12 ≥ 0
— 2x1 + x2+8 ≥ 0
2x1 — 2x2+10 ≥ 0
Приводим систему неравенств к следующему виду:
x1 + x2 ≤ 12
2x1 — x2 ≤ 8
— 2x1 + 2x2 ≤ 10
F(X) = — 10x1 + x2+20 → max
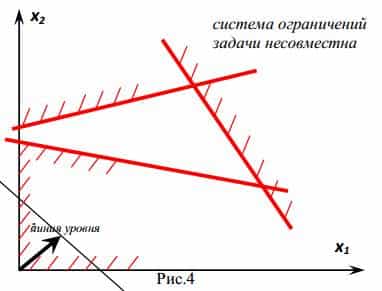
Особенности решения задач линейного программирования графическим методом
Переменную x2 принимаем в качестве дополнительной переменной и делаем замену на знак «≥»:
f=x1 + 6x3+ 27
x1 + 3x3≥6
Далее задача решается графическом способом.
Пример №2
F(X) = 3x1 — 2x2 + 5x3 — 4x5 → max при ограничениях:
x1 + x2 + x3=12
2x1 — x2 + x4=8
— 2x1 + 2x2 + x5=10
F(X) = 3x1 — 2x2 + 5x3 — 4x5
Переход к СЗЛП.
Расширенная матрица системы ограничений-равенств данной задачи:
| 1 | 1 | 1 | 0 | 0 | 12 |
| 2 | -1 | 0 | 1 | 0 | 8 |
| -2 | 2 | 0 | 0 | 1 | 10 |
Приведем систему к единичной матрице методом жордановских преобразований.
1. В качестве базовой переменной можно выбрать x3.
2. В качестве базовой переменной можно выбрать x4.
3. В качестве базовой переменной можно выбрать x5.
Поскольку в системе имеется единичная матрица, то в качестве базисных переменных принимаем X = (3,4,5).
Соответствующие уравнения имеют вид:
x1 + x2 + x3 = 12
2x1 — x2 + x4 = 8
— 2x1 + 2x2 + x5 = 10
Выразим базисные переменные через остальные:
x3 = — x1 — x2+12
x4 = — 2x1 + x2+8
x5 = 2x1 — 2x2+10
Подставим их в целевую функцию:
F(X) = 3x1 — 2x2 + 5(- x1 — x2+12) — 4(2x1 — 2x2+10)
или
F(X) = — 10x1 + x2+20 → max
Система неравенств:
— x1 — x2+12 ≥ 0
— 2x1 + x2+8 ≥ 0
2x1 — 2x2+10 ≥ 0
Приводим систему неравенств к следующему виду:
x1 + x2 ≤ 12
2x1 — x2 ≤ 8
— 2x1 + 2x2 ≤ 10
F(X) = — 10x1 + x2+20 → max
- Составить систему математических зависимостей (неравенств) и целевую функцию.
- Изобразить геометрическую интерпретацию задачи.
- Найти оптимальное решение.
- Провести аналитическую проверку.
- Определить существенные и несущественные ресурсы и их избытки.
- Определить значение целевой функции.
- Вычислить объективно обусловленные оценки.
- Составить соотношение устойчивости.
Графический метод решения задачи линейного программирования
Простейшим методом решения задачи линейного программирования является графический. Графический метод используется для получения решения задач, в которых участвуют в рассмотрении только две переменные. Графический метод решения задачи линейного программирования предусматривает осуществление следующих этапов:
Строится многоугольная область допустимых решений.
Строится вектор-градиент целевой функции.
Линия уровня  (где
(где — постоянная величина) − прямая, перпендикулярная вектору-градиенту — передвигается в направлении этого вектора в случае максимизации целевой функции до тех пор, пока не покинет пределов области допустимых решений. Предельная точка (или точки) области допустимых решений при этом движении и является точкой максимума целевой функции.
— постоянная величина) − прямая, перпендикулярная вектору-градиенту — передвигается в направлении этого вектора в случае максимизации целевой функции до тех пор, пока не покинет пределов области допустимых решений. Предельная точка (или точки) области допустимых решений при этом движении и является точкой максимума целевой функции.
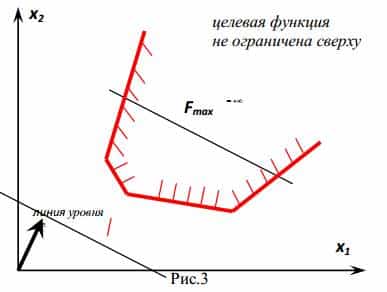
При минимизации целевой функции линия уровня перемещается в направлении, противоположном вектору-градиенту. Если прямая при своем движении не покидает области допустимых решений, то соответствующий максимум или минимум целевой функции не существует.
Использование графического метода для решения задач линейного программирования рассмотрим на примере 1.1.
Пример 1.1. Изготовление двух видов изделий А и Б включает выполнение трех операций. Трудоемкость обработки каждого изделия на этих операциях, фонды времени и прибыль на единицу изделия приведены в табл.. 1.1.
Прибыль на единицу изделия, тыс.руб.
Решение
Этап 1. Математическая постановка задачи.
Пусть  – количество выпускаемых изделий вида А;
– количество выпускаемых изделий вида А; – количество выпускаемых изделий вида Б. Тогда целевая функция примет вид
– количество выпускаемых изделий вида Б. Тогда целевая функция примет вид


Этап 2. Графическое решение задачи.
На плоскости построим декартову систему координат (рис. 1.1). На горизонтальной оси наносим значения переменной  , на вертикальной –
, на вертикальной – . Неравенства (1.5) — (1.9) на графике изображаются в виде полуплоскостей, ограниченных соответствующими прямыми:
. Неравенства (1.5) — (1.9) на графике изображаются в виде полуплоскостей, ограниченных соответствующими прямыми:

;
;

;
;

.

Рис. 1.1. Графическое решение задачи определения оптимального плана
производства двух видов изделий
Пять полуплоскостей образуют область определения целевой функции, которая называется областью допустимых решений (область ОДР, заштрихована).
Задача заключается в том, чтобы из всех точек области ОДР найти такую, в которой целевая функция принимает максимальное значение. Известно, что если целевая функция имеет экстремум в ОДР, то он обычно достигается в вершине ОДР.
Для рассматриваемой задачи многоугольник, образующий ОДР, имеет пять вершин. Для выбора вершины, дающей максимум целевой функции, необходимо построить градиент. Градиент – это радиус-вектор, выходящий из начала координат и показывающий направление наискорейшего роста функции. Для построения градиента необходимы две точки, одной из которых будет начало координат, а другую определим по формуле:

,
где  — радиус-векторы, совпадающие с координатными осями
— радиус-векторы, совпадающие с координатными осями и
и .
.

,
т. е. вторая точка будет иметь координаты (2, 4).
Построив градиент (рис. 1.1), легко можно определить единственную точку, дающую максимум целевой функции. Эта точка А с координатами (3, 5).
Таким образом, целевая функция достигает максимума при

.
Этап 3. Анализ полученного результата.
Оптимальным планом производства для машиностроительного предприятия будет выпуск изделия А в количестве 3 шт. и изделия Б – 5 шт., при этом предприятие получит максимальную прибыль в размере 26 тыс.руб.
Задача 1.1. Изготовление двух видов изделий А и Б включает выполнение четырех операций. Трудоемкость обработки каждого изделия на этих операциях, фонды времени и прибыль на единицу изделия приведены в табл. 1.2.
Трудоемкость обработки изделия, нормо-ч