- Линейное программирование. Решение задач
- Линейное программирование. Решение задач графическим способом
- Симплексный метод решения задач линейного программирования
- Решение двойственной задачи линейного программирования
- Двойственный симплекс-метод
- §7.2 Графический метод и симплекс-метод решения задач линейного программирования Графический метод решения злп
- Графический метод решения ЗЛП
- Особенности решения задач линейного программирования графическим методом
Линейное программирование. Решение задач
Ниже представлены примеры решения задач линейного программирования.
Линейное программирование. Решение задач графическим способом
Симплексный метод решения задач линейного программирования
- Метод искусственного базиса
- Задача оптимального производства продукции
- Пример решения симлекс-методом
Решить следующую задачу ЛП в неканонической форме симплекс-методом:
f(x) = x1 – x2 – 3x3 → min - М-метод. Решить задачу М-задачу.
- Пример нахождения максимума функции симплексным методом
- Пример нахождения минимума функции симплексным методом
- Пример решения модифицированным симплекс-методом
- Пример решения симплекс-методом в столбцовой форме записи
- Симплекс-метод в строчечной форме записи. Пример решения
- Пример решения задачи симплексным методом в Excel
- Линейное программирование в Excel
Решение двойственной задачи линейного программирования
- Двойственная задача ЛП
Необходимо выполнить в указанном порядке следующие задания.
1. Найти оптимальный план прямой задачи:
а) графическим методом;
б) симплекс-методом (для построения исходного опорного плана рекомендуется использовать метод искусственного базиса).
2. Построить двойственную задачу.
3. Найти оптимальный план двойственной задачи из графического решения прямой, используя условия дополняющей нежесткости. - Двойственная задача в Excel
- Оценка целесообразности выпуска новой продукции
Двойственный симплекс-метод
Методы линейного программирования применяются для решения многих экстремальных задач, с которыми довольно часто приходится иметь дело в экономике. Решение таких задач сводится к нахождению крайних значений (максимума и минимума) некоторых функций переменных величин. Линейное программирование основано на решении системы линейных уравнений (с преобразованием в уравнения и неравенства), когда зависимость между изучаемыми явлениями строго функциональна. Для него характерны математическое выражение переменных величин, определенный порядок, последовательность расчетов (алгоритм), логический анализ. Применять его можно только в тех случаях, когда изучаемые переменные величины и факторы имеют математическую определенность и количественную ограниченность, когда в результате известной последовательности расчетов происходит взаимозаменяемость факторов, когда логика в расчетах, математическая логика, совмещаются с логически обоснованным пониманием сущности изучаемого явления. Методом линейного программирования решается транспортная задача, т.е. задача рационального прикрепления предприятий-потребителей к предприятиям-производителям.
§7.2 Графический метод и симплекс-метод решения задач линейного программирования Графический метод решения злп

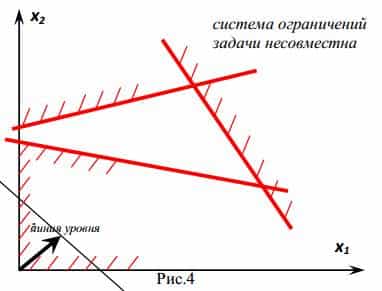
Надо построить область допустимых решений системы ограничений. При этом возможны случаи:
1) область допустимых решений — пустое множество;
2) область допустимых решений — единственная точка;
3) область допустимых решений — выпуклый многоугольник;
4) область допустимых решений — выпуклая неограниченная область.
В первом случае ЗЛП не имеет оптимального решения из-за несовместности системы ограничений.
Во втором случае — это единственное решение и будет оптимальным решением.
В третьем случае, чтобы найти оптимальное решение задачи, можно найти координаты всех угловых точек многоугольника, вычислить значения целевой функции во всех угловых точках. Наибольшее из этих значений и будет максимальным значением целевой функции, а наименьшее — минимальным, а координаты соответствующей угловой точки — оптимальным решением.
Существует другой способ, который позволяет графически сразу найти угловую точку, соответствующую оптимальному решению.

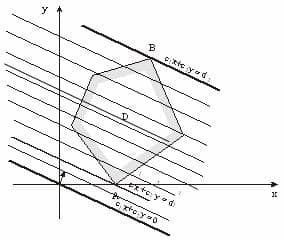
Пусть с0 — некоторое число. Прямая является линией уровня целевой функции. В каждой точке этой прямой целевая функция принимает одно и то же значение, равное с0. Вектор — градиент целевой функции


перпендикулярен к линиям уровня и показывает направление, в котором эта функция возрастает с наибольшей скоростью. Выбирая из линий уровня, проходящих через область допустимых решений, наиболее удаленную в направлениях вектора (в случае минимизации — в противоположном направлении), определим угловую точку, в которой целевая функция принимает максимальное (минимальное) значение.
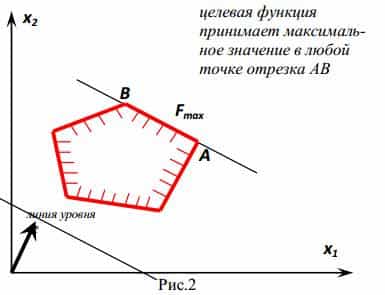
Если экстремум достигается в двух угловых точках, то, по теореме об альтернативном оптимуме, оптимальным решением будет любая точка отрезка, соединяющего эти точки:
 ,
,  .
.
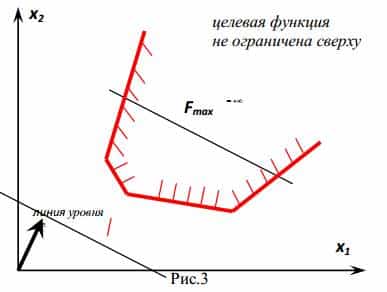
В четвертом случае, когда область допустимых решений системы ограничений задачи неограниченная выпуклая область, оптимальное решение находится аналогично описанному выше. В данном случае оптимальное решение может совпадать с одной угловой точкой, с двумя угловыми точками и оптимальное решение может и не существовать из-за неограниченности целевой функции сверху в задаче на максимум или снизу в задаче на минимум.
Пример 1. Решить графически следующую задачу:

,

Построим область допустимых решений системы ограничений:
Графический метод решения ЗЛП
В линейном программировании используется графический метод, с помощью которого определяют выпуклые множества (многогранник решений). Если основная задача линейного программирования имеет оптимальный план, то целевая функция принимает значение в одной из вершин многогранника решений (см. рисунок).
Инструкция . Выберите количество строк (количество ограничений). Если количество переменных больше двух, необходимо систему привести к СЗЛП (см. пример и пример №2). Если ограничение двойное, например, 1 ≤ x1 ≤ 4 , то оно разбивается на два: x1 ≥ 1 , x1 ≤ 4 (т.е. количество строк увеличивается на 1).
Построить область допустимого решения (ОДР) можно также с помощью этого сервиса.
Решение матричной игры
С помощью сервиса в онлайн режиме можно определить цену матричной игры (нижнюю и верхнюю границы), проверить наличие седловой точки, найти решение смешанной стратегии методами: минимакс, симплекс-метод, графический (геометрический) метод, методом Брауна.
- На плоскости X10X2 строят прямые.
- Определяются полуплоскости.
- Определяют многоугольник решений;
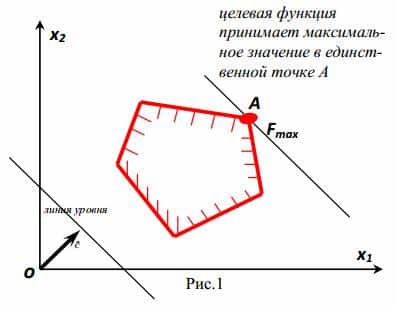
- Строят вектор N(c1,c2), который указывает направление целевой функции;
- Передвигают прямую целевую функцию c1x2 + c2x2 = 0 в направлении вектора N до крайней точки многоугольника решений.
- Вычисляют координаты точки и значение целевой функции в этой точке.
- Целевая функция принимает экстремальное (минимальное или максимальное) значение в единственной точке А.
- Сформулировать математическую модель задачи линейного программирования.
- Решить задачу линейного программирования графическим способом (для двух переменных).
Если количество переменных в задаче линейного программирования больше двух, то задачу предварительно сводят к стандартной ЗЛП.
F(X) = 3x1 — 2x2 + 5x3 — 4x5 → max при ограничениях:
x1 + x2 + x3=12
2x1 — x2 + x4=8
— 2x1 + 2x2 + x5=10
F(X) = 3x1 — 2x2 + 5x3 — 4x5
Переход к СЗЛП.
Расширенная матрица системы ограничений-равенств данной задачи:
| 1 | 1 | 1 | 0 | 0 | 12 |
| 2 | -1 | 0 | 1 | 0 | 8 |
| -2 | 2 | 0 | 0 | 1 | 10 |
Приведем систему к единичной матрице методом жордановских преобразований.
1. В качестве базовой переменной можно выбрать x3.
2. В качестве базовой переменной можно выбрать x4.
3. В качестве базовой переменной можно выбрать x5.
Поскольку в системе имеется единичная матрица, то в качестве базисных переменных принимаем X = (3,4,5).
Соответствующие уравнения имеют вид:
x1 + x2 + x3 = 12
2x1 — x2 + x4 = 8
— 2x1 + 2x2 + x5 = 10
Выразим базисные переменные через остальные:
x3 = — x1 — x2+12
x4 = — 2x1 + x2+8
x5 = 2x1 — 2x2+10
Подставим их в целевую функцию:
F(X) = 3x1 — 2x2 + 5(- x1 — x2+12) — 4(2x1 — 2x2+10)
или
F(X) = — 10x1 + x2+20 → max
Система неравенств:
— x1 — x2+12 ≥ 0
— 2x1 + x2+8 ≥ 0
2x1 — 2x2+10 ≥ 0
Приводим систему неравенств к следующему виду:
x1 + x2 ≤ 12
2x1 — x2 ≤ 8
— 2x1 + 2x2 ≤ 10
F(X) = — 10x1 + x2+20 → max
Особенности решения задач линейного программирования графическим методом
Переменную x2 принимаем в качестве дополнительной переменной и делаем замену на знак «≥»:
f=x1 + 6x3+ 27
x1 + 3x3≥6
Далее задача решается графическом способом.
Пример №2
F(X) = 3x1 — 2x2 + 5x3 — 4x5 → max при ограничениях:
x1 + x2 + x3=12
2x1 — x2 + x4=8
— 2x1 + 2x2 + x5=10
F(X) = 3x1 — 2x2 + 5x3 — 4x5
Переход к СЗЛП.
Расширенная матрица системы ограничений-равенств данной задачи:
| 1 | 1 | 1 | 0 | 0 | 12 |
| 2 | -1 | 0 | 1 | 0 | 8 |
| -2 | 2 | 0 | 0 | 1 | 10 |
Приведем систему к единичной матрице методом жордановских преобразований.
1. В качестве базовой переменной можно выбрать x3.
2. В качестве базовой переменной можно выбрать x4.
3. В качестве базовой переменной можно выбрать x5.
Поскольку в системе имеется единичная матрица, то в качестве базисных переменных принимаем X = (3,4,5).
Соответствующие уравнения имеют вид:
x1 + x2 + x3 = 12
2x1 — x2 + x4 = 8
— 2x1 + 2x2 + x5 = 10
Выразим базисные переменные через остальные:
x3 = — x1 — x2+12
x4 = — 2x1 + x2+8
x5 = 2x1 — 2x2+10
Подставим их в целевую функцию:
F(X) = 3x1 — 2x2 + 5(- x1 — x2+12) — 4(2x1 — 2x2+10)
или
F(X) = — 10x1 + x2+20 → max
Система неравенств:
— x1 — x2+12 ≥ 0
— 2x1 + x2+8 ≥ 0
2x1 — 2x2+10 ≥ 0
Приводим систему неравенств к следующему виду:
x1 + x2 ≤ 12
2x1 — x2 ≤ 8
— 2x1 + 2x2 ≤ 10
F(X) = — 10x1 + x2+20 → max
- Составить систему математических зависимостей (неравенств) и целевую функцию.
- Изобразить геометрическую интерпретацию задачи.
- Найти оптимальное решение.
- Провести аналитическую проверку.
- Определить существенные и несущественные ресурсы и их избытки.
- Определить значение целевой функции.
- Вычислить объективно обусловленные оценки.
- Составить соотношение устойчивости.