- Самоучитель по программированию PIC контроллеров для начинающих
- Программирование на ассемблере для
- PIC микроконтроллеров
- Самоучитель по программированию PIC контроллеров для начинающих
- (руководство по конструированию устройств на микроконтроллерах)
- Общие замечания по стратегии «въезда».
- Знакомство с семейством PIC
Самоучитель по программированию PIC контроллеров для начинающих

В 2006-м году возникло у меня желание освоить ассемблер для PIC микроконтроллеров. Решение осваивть именно PIC-и сформировалось не случайно. Для начала всего лишь 35 команд ассемблера. Запомнить наизусть их можно за несколько дней применяя на практике, при написании собственной программы. Или же просто заучить, пользуясь даташитом на любой из PIC контроллеров. Благо, что часть документации доступна на русском языке.
Ну и первая конструкция — само-собой часы. И несложно(во всяком случае в начале мне так казалось) и дома и на работе часам или таймеру применение найти легко. Единственное препятствие, с которым пришлось столкнуться — это отсутствие ясной и последовательно изложенной информации по, непосрественно, способам программирования.
В сети много сайтов с микроконтроллерной тематикой, но часто эта информация выложена в виде этакого винигрета, в котором разобраться, имея нулевой опыт в программировании чипов очень трудно.
После запуска схемы «первый проект на микроконтроллере» — мигания светодиодом начался судорожный поиск дельной информации. И совершенно случайно, рыская по сети в поисках информации по очередной схеме из журнала «Радио» (частотомер Денисова) вышел на сайт Евгения Корабельникова.
Не могу сказать, что на этом мои поиски закончились. Некоторые подходы придумывал сам, а свой код, он как правило всегда лучше, чем придуманный кем-то другим.
Но более последовательного и методичного изложения вопросов по структуре микроконтроллеров, вариантам протоколов обмена информацией PIC-а с внешними устройствами(индикаторы, датчики), работы с микросхемами памяти и многого другого, не встретил пока больше нигде.
Евгений — Автор с большой буквы, сумел упорядочить и переложить в нормально читаемый текст огромное количество материала, сделав его понятным и доступным, даже для тех, кто никогда раньше с программированием не сталкивался.
Если Вам нужен быстрый старт и программирование на ассемблере для PIC контроллеров, то рекомендую сайт Евгения Александровича.
Программирование на ассемблере для
PIC микроконтроллеров
Самоучитель по программированию PIC контроллеров для начинающих
(руководство по конструированию устройств на микроконтроллерах)

Общие замечания по стратегии «въезда».
«Самоучитель. » составлен таким образом, что, в случаях наличия каких-то неясностей, возникающих после прочтения предыдущих разделов, в последующих разделах, они постепенно проясняются за счет дополнительной информации. На первичной стадии «въезда», главное — понять смысл, а все остальное к нему, со временем, приложится.
Введение
1. Готовим инструменты. Изготовление программатора и работа с ним.
2. Что такое микроконтроллер, и как он работает.
3. Система команд PIC16F84A.
4. Что такое программа и правила ее составления. Пример создания программы автоколебательного мультивибратора. Директивы. Принципиальная схема мультивибратора
5. Интегрированная среда проектирования MPLAB IDE и работа в ней.
6. Что дальше?
7. Пример создания программы (начало).
8. Пример создания программы (продолжение).
9. Работа в симуляторе. Отладка программы.
10. Как отследить выполнение программы
11. Прерывания. Стек. Пример разработки программы с уходом в прерывания.
12. Организация вычисляемого перехода. Работа с EEPROM памятью данных.
13. Флаги. Работа с флагами. Как работает цифровой компаратор. Перенос и заем.
14. Пример задействования флага С в трехбайтном суммирующем устройстве. Циклический сдвиг. Операция умножения.
15. Введение в принцип построения подпрограммы динамической индикации. Косвенная адресация.
16. Преобразование двоичных чисел в двоично-десятичные. Окончательное формирование текста подпрограммы динамической индикации.
17. Принцип счета. Работа с таймером TMR0. Принцип установки групп команд счета в текст программы.
Заключение
Скачать приложения
Приложения к самоучителю с сайта автора
формат PDF
размер файла 2,5 Мб
Знакомство с семейством PIC
Наконец-то сегодня нашлось время познакомить вас с ещё одним семейством микроконтроллеров — это микроконтроллеры PIC.
Данные микроконтроллеры также являются очень известными, устанавливаются во многие устройства и давно уже снискали у радиолюбителей очень сильный интерес.
Разработчиком данного семейства является компания Microchip, которая также ялвяется очень известной и её продукция востребована по всему миру.
Изучение данной серии контроллеров является очень нелёгким вопросом, я этим заниматься начал уже давно, но нормально разобрался с линейкой только сейчас. Последнее время я немного ускорил процесс изучения микроконтроллеров PIC благодаря вашим просьбам в группах и чатах, на которые я не мог не откликнуться.
Также к тому, чтобы поделиться своими знаниями в области программирования данной линейки, меня подтолкнуло то, что я видел много блогов, уроков (в том числе и видео) очень хорошего качества по контроллерам PIC именно с использованием языка ассемблер. А вот на языке C уроков очень мало, что подчёркивает их востребованность.
Поэтому замечу, что программировать МК PIC мы будем именно на языке C. Какую мы выберем среду программирования и компилятор, мы решим чуть позже, а пока же в данном уроке нас ждёт краткое знакомство с самими контроллерами, с их архитектурой и их разновидностями.
Разновидностями контроллеров мы будем считать их деление по архитектуре. Примем за основу разрядность их ядра.
Например, те контроллеры AVR, с которыми мы до сих пор работаем, являются 8-битными, а контроллеры STM, которые мы изучаем — 32-битными.
Вот и контроллеры PIC также делятся по битности.
Первая линейка — это 8-битные контроллеры PIC. Наименование их моделей начинается с префикса PIC10/PIC12/PIC16.
Данная линейка также делится на 3 семейства.
1. BASELINE — данная архитектура присутствует у контроллеров PIC10. От более мощной серии она отличается количеством выводов (от 6 до 28), дешевизной.
2. MID-RANGE — данную архитектуру имеют ядра микроконтроллеров PIC12/PIC16. Количество выводов в данной серии увеличено (от 6 до 64), стоят они несколько дороже, зато имеют помимо 35 машинных инструкций, поддерживаемых серией BASELINE, ещё 14 дополнительных инструкций (оптимизированных под компилятор языка C). Также у данной серии производительность увеличена на 50%, они имеют более глубокий и улучшенный аппаратный стек, увеличенный объём памяти и некоторые прочие прелести, с которыми мы познакомимся в дальнейшем, так как, скорее всего, мы с данной серии и начнём процесс изучения программирования микроконтроллеров PIC.
3. 8-битовые микроконтроллеры PIC18 — это улучшенная серия контроллеров, здесь на борту много другой периферии, количество выводов от 18 до 100, производительность 16 MIPS, поддержка технологии NanoWatt, наличие программироуемого генератора.
Вторая линейка — это 16-битные контроллеры PIC. Они имеют префикс PIC24F и PIC24H. Это уже более мощные контроллеры. В отличие от первой линейки, машинная команда выполняется уже не за 4 такта генератора, а за 2. Также периферия еще более расширена по разновидностям шин, прямой доступ к памяти DMA (у PIC24H), расширенный набор инструкций. Также есть очень много других особенностей.
Третья линейка — это 32-битные контроллеры. Префикс у них уже PIC32. Частота тактирования таких контроллеров до 120 МГц, а у новой серии MZ — до 200 и даже выше. У меня, например, есть отладочная плата, на которой устрановлен контроллер PIC32MZ2048EFH064, у которого тактовая частота составляет 252 мегагерца. Также здесь ещё более увеличена производительность ядра. Данное семейство построено на ядре MIPS32®, которое также кроме высокой производительности отличается ещё и низким потреблением энергии.
Вообщем, вот такие вот краткие характеристики существующих на данный момент контроллеров PIC. Если брать по наименованиям, то наименований очень много, на любой, как говорится, вкус.
Также, как и рассмотренные, а также рассматриваемые нами контроллеры AVR и STM32, контроллеры PIC работают приблизительно по той же схеме. Сочиняется программа, собирается в машинный код, понятный арифметическо-логическому устройству контроллера, загружается (прошивается или заливается) в контроллер и затем обеспечивает работу по определённому алгоритму. Основной интерфейс, используемый для прошивки данных контроллеров — это ICSP, предназначенный для внутрисхемного программирования. Подробнее с ним мы познакомимся, когда будем прошивать данные контроллеры.
Давайте немного разберёмся с организацией памяти в контроллерах PIC. Так как мы начнём изучение семейства PIC с более простых 8-битных (принцип от простого — к сложному ведь не отменял никто), то и организацию памяти мы посмотрим у данной серии.
Сначала посомтрим блок-схему контроллера на примере МК PIC16F84A (нажмите на картинку для увеличения изображения)
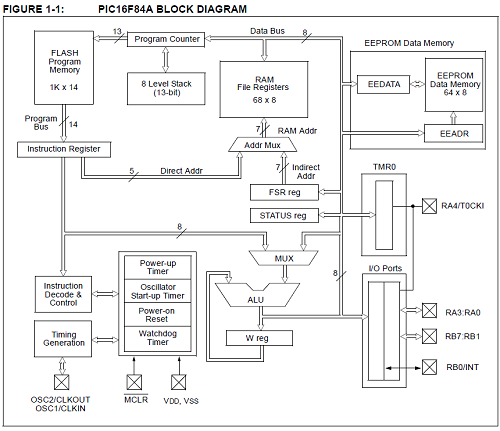
В левом верхнем углу сразу бросается в глаза модуль памяти FLASH, в которой обычно хранится программа контроллера (прошивка). А в правом верхнем углу мы видим память EEPROM, которая уже исользуется для хранения данных. Эти два вида памяти являются энергонезависимыми и после отклчения и сброса контроллера не стираются. Но данная память не является быстрой, поэтому код при старте программы распределяется уже в память RAM (ОЗУ), которая уже является быстродействующей и предназначена для функционирования контроллера при работе. Поэтому данную память мы уже рассмотрим несколько поподробнее.
Оперативная память контроллера PIC делится на память программ и память данных.
Вот так организована память программ у контроллера PIC16F84A
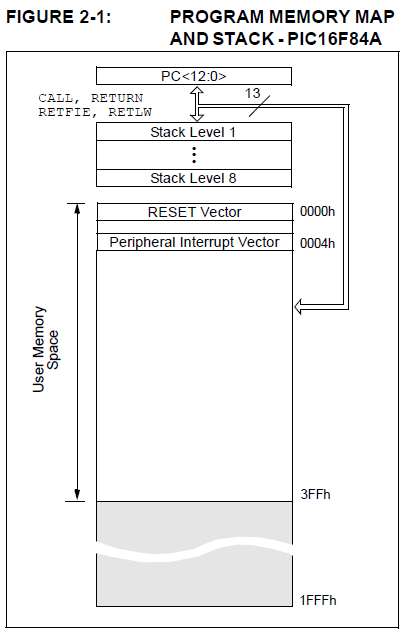
Микроконтроллеры данной серии имеют счётчик команд, способный адресовать 8К x 14 слов памяти программ и 14-разрядную шину данных памяти программ. Вся память программ разделена на 4 страницы по 2 килослов каждая (0000h-07FFh, 0800h-0FFFh, 1000h-17FFh, 1800h-1FFFh). Ну это общая информация, поэтому у тех контроллеров, у которых память небольшая перемещение между данными страницами приведёт к циклической адресации. Поэтому размер памяти того контроллера, который мы хотим программировать, мы обязаны знать твёрдо. В общем случае память программ состоит из счётчика команд, стека нескольких уровней, память для хранения векторов прерываний, а также внутренней памяти программ.
Также немного познакомимся с организации оперативной памяти, отведённой под хранение данных.
Память данных разделяется на регистры общего назначения и регистры специального назначения. Посмотрим, как организована память данных контроллера PIC16F84A
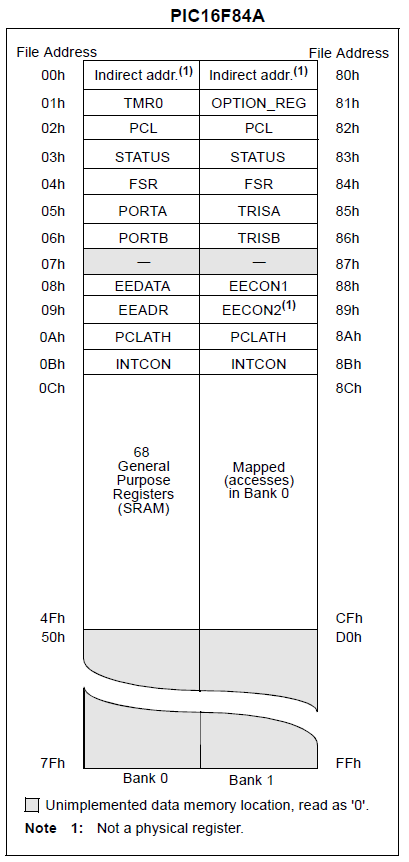
Регистры специального назначения (SFR) — это регистры, которые предназначены для хранения строго отведённых величин и имеют определённые имена. С ними мы будем знакомиться постепенно, когда будем писать какой-то исходный код, который будет широко их использовать.
Регистры общего назначения (GPR) — это ячейки памяти, которые имеют только адреса и предназначены они для хранения любых данных.
Также из приведённого выше рисунка мы видим, что у нашего контроллера память данных разделена на 2 страницы (или банка) переход между которыми осуществляется посредством установки определённых битов в регистре STATUS. Поэтому данный регистр присутствует в обеих банках и обратиться к нему мы можем в любой момент, чтобы сменить текущую страницу памяти.
Адресация может быть как прямая, так и косвенная или относительная, когда адрес отсчитывается относительно текущего адреса. С этим мы возможно не будем знакомиться, так как такая задача возникает у программистов, которые пишут программы на ассемблере.
Соответственно, у каждого контроллера кроме памяти существует много чего ещё интересного, в том числе порты ввода-вывода. Наши контроллеры PIC — также не исключение. Посмотрим назначение ножек контроллера PIC16F84A
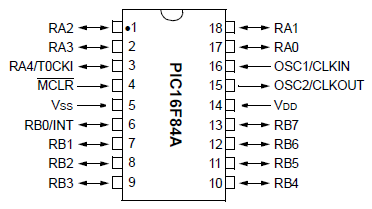
У данного контроллера два порта — порт A и порт B. Из порта A наружу выведены 5 ножек — RA0-RA4, а из порта B — все 8 ножек RB0-RB7.
Также ножки портов могут иметь и другое назначение в зависимости от того, как мы их сконфигурируем. Наример ножка 6 или RB0 может в любой момент превратиться в ножку для захвата внешних прерываний, а ножка 3 или RA4 — стать ножкой для тактирования таймера от внешнего генератора.
Тактирование МК PIC также может осуществляться как от внешнего генератора, так и от кварцевого резонатора, от внутреннего резистора, а также существует ещё несколько вариантов, которые поддерживают не все контроллеры данного семейства. На практике как правило используется тактирование от кварцевого резонатора. Скорее всего, мы также последуем данной традиции в наших дальнейших занятиях.
Думаю, на этом мы закончим знакомство с контроллерами PIC. Знакомство получилось кратким, но на первое время нам и этого хватит за глаза. С более расшифрованной информацией мы столкнёмся, когда будем сочинять наши программы. Так что ждите следующих занятий, которые обещают быть очень интересными. Мы познакомимся сначала с установкой среды и компилятора, изучим, как с ними работать, какие тонкости программирования присутствуют в настройках различной периферии, а также в работе с ней.
Смотреть ВИДЕОУРОК (нажмите на картинку)