- Line Detection OpenCV Python: Unlock Hidden Patterns in Images Read it later
- What is Line Detection?
- Importance of Line Detection
- What is the Hough Transform Algorithm?
- What is Probabilistic Hough Transform?
- Advantages of Probabilistic Hough Transform
- Line Detection Algorithm using OpenCV Python
- Python opencv detect lines
- Theory
- Hough Line Transform
- How does it work?
- Standard and Probabilistic Hough Line Transform
- What does this program do?
- Code
- Line detection in python with OpenCV | Houghline method
Line Detection OpenCV Python: Unlock Hidden Patterns in Images Read it later
Line detection plays a crucial role in computer vision applications. It helps us identify and extract important information from images by locating the edges and lines present within them. In this blog, we will focus on using OpenCV, an open-source library widely recognized for its capabilities in computer vision and image processing. By leveraging the power of Python and OpenCV, you’ll gain the knowledge and skills to master line detection.
What is Line Detection?
Line detection is the process of finding the straight lines in an image. It is an important step in image processing and computer vision. It is used in various applications such as lane detection in self-driving cars, OCR (Optical Character Recognition), and edge detection.
There are many algorithms available for line detection, but in this blog post, we will focus on the Hough Transform algorithm, which is widely used and easy to implement using OpenCV and Python.
Importance of Line Detection
Line detection plays a crucial role in computer vision applications, offering valuable insights into the structure, boundaries, and patterns within images. Here are some key reasons why line detection is significant:
- Object Recognition and Tracking: Lines serve as visual cues for object recognition and tracking. By detecting lines, computer vision systems can identify objects based on their shapes or patterns. This is particularly important in self-driving cars, where line detection helps navigate lanes and road boundaries accurately.
- Shape Analysis and Measurement: Lines form the foundation of shapes. Detecting lines allows us to analyze object shapes and extract measurements such as length, width, and angles. This is essential in fields like manufacturing, architecture, and quality control.
- Image Segmentation and Feature Extraction: Line detection aids in segmenting images into meaningful regions or objects. This segmentation enables the extraction of specific features or objects of interest, facilitating efficient analysis and understanding of visual data.
- Optical Character Recognition (OCR): Line detection is crucial in OCR systems. By detecting and extracting lines of text, OCR algorithms accurately convert printed or handwritten text into editable digital formats. OCR finds applications in document digitization and text analysis.
- Image Filtering and Noise Removal: Line detection techniques can filter out the noise and improve image quality. By isolating lines and removing unwanted elements, we enhance image clarity and interpretation. Medical imaging benefits from the precise identification of structures like blood vessels.
- Augmented Reality and Virtual Reality: Line detection forms the foundation for AR and VR experiences. By identifying lines and their spatial relationships, AR and VR systems overlay virtual objects onto real-world scenes, creating immersive visualizations and interactive gaming.
What is the Hough Transform Algorithm?
The Hough Transform algorithm, a remarkable technique developed by Richard Duda and Peter Hart in 1972, enables the detection of lines in images or videos. It revolutionized the field of computer vision and remains a powerful tool for line detection.
So, how does the Hough Transform algorithm work? Let’s dive into the details.
Each point in the image is transformed into a line in the parameter space. This conversion allows us to represent lines in a different coordinate system, making line detection more feasible. Think of it as a translation from the image domain to a space where lines become easier to analyze.
The Hough Transform algorithm is based on the following assumptions:
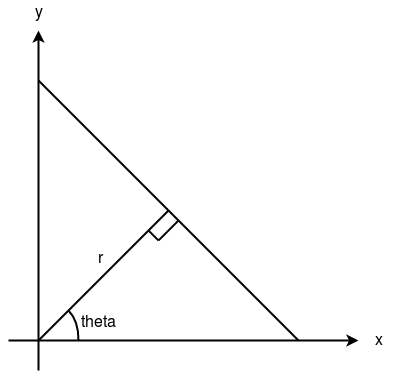
- Lines in an image can be represented by their equation in polar coordinates, which is given by: r = xcos(theta) + ysin(theta) , where (r, theta) are the parameters of the line, and (x, y) are the coordinates of a point on the line.
- A point in an image corresponds to a sinusoidal curve in the parameter space.
- The intersection of curves in the parameter space corresponds to a line in the image.
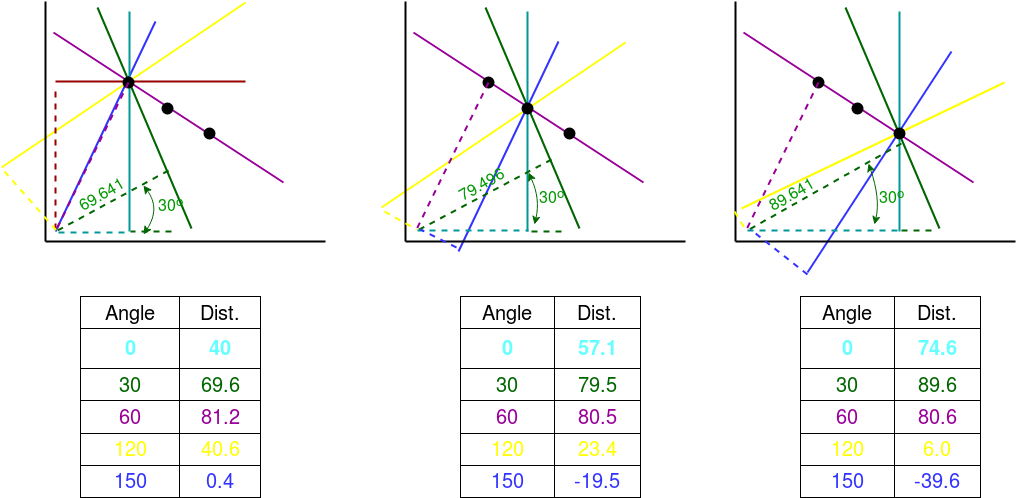
By considering these assumptions, we can establish that a point in an image corresponds to a sinusoidal curve in the parameter space. As we detect more points, these curves intersect and accumulate at certain locations. These intersections indicate the presence of lines in the image.
To put it simply, the peaks observed in the parameter space represent lines within the image. By identifying these peaks, we can extract the lines and further analyze their properties.
The beauty of the Hough Transform algorithm lies in its ability to detect lines even in the presence of noise, occlusions, or other disturbances. It has become an indispensable tool in various computer vision applications, including edge detection, shape recognition, and more.
What is Probabilistic Hough Transform?
The Probabilistic Hough Transform (PHT) is an enhanced version of the traditional Hough Transform used for line detection in computer vision. It offers significant advantages in terms of computational efficiency.
The PHT works by randomly sampling a subset of points from the edge image, which is generated using techniques like the Canny edge detector. This sampling reduces the computational load while maintaining accurate line detection.
In the Probabilistic Hough Transform, lines are represented by two parameters:
- The angle they make with the horizontal axis (θ) and,
- The distance from the origin to the line along the perpendicular drawn from the origin (ρ).
By converting the line detection problem into a peak-finding problem in the Hough space, the PHT efficiently detects lines in an image.
The steps of the Probabilistic Hough Transform include:
- Randomly selecting a subset of points from the edge image.
- Calculating the line parameters (θ and ρ) for each selected point.
- Accumulating votes in the Hough space for each line parameter combination.
- Identifying peaks in the Hough space, indicating potential lines in the image.
- Thresholding the peaks to determine the most significant lines.
- Retrieving the line equations from the peak parameters.
By intelligently sampling points and focusing on relevant lines, the Probabilistic Hough Transform achieves fast and accurate line detection. This algorithm is particularly useful in real-time applications and when working with large images.
Advantages of Probabilistic Hough Transform
The Probabilistic Hough Transform (PHT) offers several advantages for line detection:
- Computational Efficiency: The PHT reduces computational load and speeds up line detection, making it suitable for large images and real-time applications.
- Enhanced Speed and Accuracy: By sampling a subset of edge points, the PHT maintains high accuracy while detecting lines faster.
- Robustness to Gaps: The PHT can detect lines with interruptions or gaps in edge segments.
- Adaptive Thresholding: The PHT adjusts the minimum points required for line detection, improving results in varying line densities.
- Accurate Line Segmentation: The PHT estimates start and end points, enabling precise line localization and tracking.
Line Detection Algorithm using OpenCV Python
Now that we have a fundamental grasp of the Hough Transform and Probabilistic Hough Transform algorithm, let’s explore their implementation using OpenCV and Python.
To identify lines in an image using OpenCV in Python, we can proceed with the following steps:
Python opencv detect lines
In this tutorial you will learn how to:
Theory
Hough Line Transform
- The Hough Line Transform is a transform used to detect straight lines.
- To apply the Transform, first an edge detection pre-processing is desirable.
How does it work?
- As you know, a line in the image space can be expressed with two variables. For example:
- In the Cartesian coordinate system: Parameters: \((m,b)\).
- In the Polar coordinate system: Parameters: \((r,\theta)\)

For Hough Transforms, we will express lines in the Polar system. Hence, a line equation can be written as:
Arranging the terms: \(r = x \cos \theta + y \sin \theta\)
- In general for each point \((x_, y_)\), we can define the family of lines that goes through that point as: \[r_ = x_ \cdot \cos \theta + y_ \cdot \sin \theta\] Meaning that each pair \((r_,\theta)\) represents each line that passes by \((x_, y_)\).
- If for a given \((x_, y_)\) we plot the family of lines that goes through it, we get a sinusoid. For instance, for \(x_ = 8\) and \(y_ = 6\) we get the following plot (in a plane \(\theta\) — \(r\)):
Standard and Probabilistic Hough Line Transform
OpenCV implements two kind of Hough Line Transforms:
a. The Standard Hough Transform
- It consists in pretty much what we just explained in the previous section. It gives you as result a vector of couples \((\theta, r_)\)
- In OpenCV it is implemented with the function HoughLines()
b. The Probabilistic Hough Line Transform
- A more efficient implementation of the Hough Line Transform. It gives as output the extremes of the detected lines \((x_, y_, x_, y_)\)
- In OpenCV it is implemented with the function HoughLinesP()
What does this program do?
- Loads an image
- Applies a Standard Hough Line Transform and a Probabilistic Line Transform.
- Display the original image and the detected line in three windows.
Code
The sample code that we will explain can be downloaded from here. A slightly fancier version (which shows both Hough standard and probabilistic with trackbars for changing the threshold values) can be found here.
Line detection in python with OpenCV | Houghline method
The Hough Transform is a method that is used in image processing to detect any shape, if that shape can be represented in mathematical form. It can detect the shape even if it is broken or distorted a little bit.
We will see how Hough transform works for line detection using the HoughLine transform method. To apply the Houghline method, first an edge detection of the specific image is desirable. For the edge detection technique go through the article Edge detectionBasics of Houghline Method
A line can be represented as y = mx + c or in parametric form, as r = xcosθ + ysinθ where r is the perpendicular distance from origin to the line, and θ is the angle formed by this perpendicular line and horizontal axis measured in counter-clockwise ( That direction varies on how you represent the coordinate system. This representation is used in OpenCV).
So Any line can be represented in these two terms, (r, θ).
Working of Houghline method:- First it creates a 2D array or accumulator (to hold values of two parameters) and it is set to zero initially.
- Let rows denote the r and columns denote the (θ)theta.
- Size of array depends on the accuracy you need. Suppose you want the accuracy of angles to be 1 degree, you need 180 columns(Maximum degree for a straight line is 180).
- For r, the maximum distance possible is the diagonal length of the image. So taking one pixel accuracy, number of rows can be diagonal length of the image.
Example:
Consider a 100×100 image with a horizontal line at the middle. Take the first point of the line. You know its (x,y) values. Now in the line equation, put the values θ(theta) = 0,1,2,….,180 and check the r you get. For every (r, 0) pair, you increment value by one in the accumulator in its corresponding (r,0) cells. So now in accumulator, the cell (50,90) = 1 along with some other cells.
Now take the second point on the line. Do the same as above. Increment the values in the cells corresponding to (r,0) you got. This time, the cell (50,90) = 2. We are actually voting the (r,0) values. You continue this process for every point on the line. At each point, the cell (50,90) will be incremented or voted up, while other cells may or may not be voted up. This way, at the end, the cell (50,90) will have maximum votes. So if you search the accumulator for maximum votes, you get the value (50,90) which says, there is a line in this image at distance 50 from origin and at angle 90 degrees.Everything explained above is encapsulated in the OpenCV function, cv2.HoughLines(). It simply returns an array of (r, 0) values. r is measured in pixels and 0 is measured in radians.