- Принципы программирования ПЛК
- Техническое задание
- Периферия
- Помехоустойчивость
- Проблемы совместимости программы с аппаратной частью
- Языки программирования и среды разработки
- Программирование ПЛК Siemens на Simatic Step7
- Введение
- Программируемые логические контроллеры Siemens
- Что из себя представляет Simatic Step 7?
- Вместо заключения
Принципы программирования ПЛК
В данном обзоре рассмотрим ряд вопросов, связанных с программированием современных логических контроллеров (ПЛК или PLC). Поскольку контроллеры разных производителей имеют различную конфигурацию, функционал и программные среды, будут приведены общие принципы и приемы разработки программ для ПЛК.
Техническое задание
Создание и утверждение технического задания (ТЗ) – очень важная часть разработки ПО. От грамотно составленного ТЗ зависит, насколько эффективно будет вестись разработка.
Опытные программисты знают, что программа не пишется за один раз. Как правило, софт корректируется и приближается итерациями к конечному варианту в соответствии с пожеланиями конструкторов, инженеров, электриков, механиков и технологов. Поэтому очень важно на этапе составления ТЗ плотно взаимодействовать со всеми заинтересованными специалистами, которые подписывают ТЗ, а по окончании принимают работу.
Периферия
В первую очередь составляется список всех дискретных входов и выходов контроллера. Также указываются аналоговые входы/выходы при их наличии.
Входы и выходы логического контроллера — это начальные и конечные точки работы алгоритма, поэтому нужно четко представлять, как должно функционировать оборудование, под которое пишется программа.
Для решения некоторых стандартных задач можно не писать программу, а воспользоваться специализированными периферийными модулями, например, модулями обработки сигналов от тензодатчиков или от инкрементального энкодера, специализированным ПИД-регулятором и проч. В результате алгоритм работы существенно упростится, а быстродействие всей системы в целом увеличится.
Необходимо собрать подробную информацию о том, как работает тот или иной датчик, какие сигналы он выдает, например, какой выход у датчика – нормально открытый или нормально закрытый. Есть ряд нюансов, связанных с аварийным или ручным управлением выходными сигналами, например, некоторые приводы могут требовать коррекции временной задержки.
Помехоустойчивость
Важно помнить о возможных проблемах, связанных с максимальным выходным током, противо-ЭДС и различными помехами, поскольку все это скажется на стабильной работе программы и оборудования в целом.
В сложном оборудовании, где применяются преобразователи частоты, коммутируются силовые цепи и действуют мощные электромагнитные поля — эти факторы необходимо предусмотреть, чтобы минимизировать их отрицательное влияние на ПЛК. Об этом обычно подробно говорится в инструкции по установке логического контроллера.
Для повышения помехоустойчивости необходимо применять программные средства. Например, обязательным является использование сторожевого таймера, который «приводит в чувство» ПЛК при его «зависании».
Также необходимо учитывать возможное накопление ошибок, искажение поступаемых на входы данных и другие нарушения в работе программы. Для этого нужно вводить программные блоки по проверке и коррекции данных и программы. Например, несмотря на то, что при включении реверсивного пускателя используется аппаратная защита (блокировка) от одновременного включения встречных направлений, такая же защита должна быть реализована и программно.
Проблемы совместимости программы с аппаратной частью
Возможно, в процессе работы выяснится, что аппаратная часть контроллера не соответствует поставленной задаче. Например, не хватает входов или выходов, памяти или быстродействия.
Проблема с нехваткой входов или выходов легко решается приобретением дополнительных периферийных модулей. Они подключаются к центральному модулю (который имеет свои входы и выходы), обмен данных происходит по внутренней шине.
С памятью и быстродействием решить вопрос просто не получится, поэтому перед приобретением «железа» нужно обкатать программу в программном эмуляторе, который есть в каждой среде программирования.
Языки программирования и среды разработки
У каждого производителя имеется своя среда программирования, «заточенная» под конкретные модели ПЛК. Однако производители пришли к соглашению, что будут использовать унифицированные языки программирования, подходящие для разных контроллеров.
Наиболее простым и наглядным языком программирования ПЛК, входящим в каждую среду разработки является язык релейных схем LD (Ladder Diagram), максимально приближенный к функциональным электрическим схемам. Его любят использовать программисты, изначально хорошо разбирающиеся в электронике.
Другой язык, имеющий обширный функционал – FBD (Function Block Diagram), который относится к графическим языкам программирования. В FBD используются законченные блоки, имеющие определенные функции. Блоки поставляются со средой программирования или создаются программистом. Существуют и другие языки (6 стандартных), но их описание выходит за рамки данной статьи.
В программных средах разработки обычно имеется большой набор готовых библиотек элементов, подпрограммы стандартных процедур и шаблонов. Также среда разработки должна обязательно включать в себя программный эмулятор, позволяющий всесторонне проверить работоспособность программы перед ее переносом на реальный контроллер.
Среды разработки разных производителей могут включать в себя разные элементы, и за каждый из них необходимо платить. Например, Siemens предлагает множество версий программной среды, которые значительно отличаются по функционалу и цене. Другой производитель – Delta – имеет полностью открытое полнофункциональное ПО, которое можно бесплатно скачать с официального сайта.
Программирование ПЛК Siemens на Simatic Step7
Добрый день, хабровчане! Полазив по Хабру, мною было обнаружено всего несколько топиков, в котором упоминалось бы словосочетание «Simatic Step 7». Хочу поделиться с Вами небольшой частью информации, накопленной мною за все время работы с программируемыми логическими контроллерами, и показать, что из себя представляют ПЛК, оболочка и что мне приходилось на них строить.
Данный пост содержит общую ознакомительную информацию о программировании ПЛК Siemens.
Введение
Устроилась я в эту фирму еще на 5м курсе института. К слову, образование мое к программированию относится весьма косвенно и было это больше увлечением. Познания мои на тот момент ограничивались курсом Delphi и весьма базовым Ассемблером. Компания занималась (да и занимается) проектированием, строительством и обслуживанием грузоподъемных машин, таких как погрузчики, портальные, козловые, мостовые и прочие краны. К ГП машинам мое образование имело еще меньше отношения. Поэтому я решила попробовать. 🙂
Программируемые логические контроллеры Siemens
ПЛК фирмы Siemens — это промышленные контроллеры и используются для автоматизации технологических процессов. У нас, в частности, использовались для автоматизации работы грузоподъемных машин.
Simatic включает в себя несколько линеек ПЛК — Simatic S5 и Simatic S7. В свою очередь линейка Simatic S7 содержит семейства S7-200, S7-300, S7-400 и S7-1200.

Чаще всего мы использовали ПЛК семейств S7-300 и S7-400, для которых компанией Siemens было разработано собственное программное обеспечение Simatic Step 7.
- модуль центрального процессора (CPU);
- блоки питания (PS) для питания контроллера от сети переменного или постоянного тока;
- сигнальные модули (SM), предназначенные для ввода/вывода дискретных и аналоговых сигналов;
- коммуникационные процессоры (CP), выполняющие автономную обработку коммуникационных задач в промышленных сетях Profibus, Industrial Ethernet и др.;
- функциональные модули (FM), которые выполняли задачи автоматического регулирования, взвешивания, позиционирования и пр.;
- интерфейсные модули (IM) для подключения стоек расширения к базовому блоку контроллера.
Кроме этого, к ПЛК через сеть Profibus подключалось большое количество ведомых устройств, таких как частотные преобразователи, приводы, абсолютные/инкрементные энкодеры и пр.
Вся работа ГП машины по максимуму автоматизировалась и крановщику нужно применять минимум усилий для управления оной.
Что из себя представляет Simatic Step 7?
Главной утилитой является Step 7 — Simatic Manager, которая позволяет производить конфигурацию ПЛК и сетей (утилиты HWConfig и NetPro).
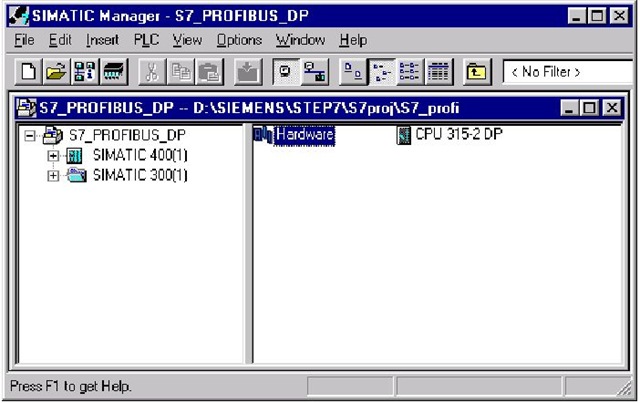
В процессе конфигурации определяется состав оборудования, способы подключения, используемые сети, адреса, выбираются настройки для используемых модулей. Готовая конфигурация загружается в ПЛК, что так же является настройкой оборудования.
Утилиты конфигурации позволяют осуществлять диагностику оборудования, обнаруживать аппаратные ошибки или неправильный монтаж.
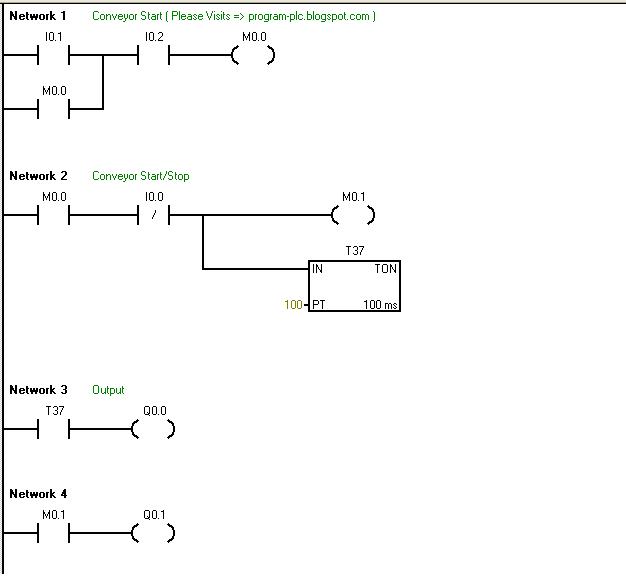
- LAD (Ladder Diagram) — релейные диаграммы. Редактор отображает программу в графическом представлении, похожем на электрическую монтажную схему. Логические схемы позволяют программе имитировать протекание электрического тока от источника напряжения через ряд логических условий на входах, которые активизируют условия на выходах. Источником напряжения выступает шина, находящаяся слева.
Основными элементами являются нормально замкнутые и нормально разомкнутые контакты.

Я работала с самого начала в STL, пробовала LAD, мне показался слишком непонятным и многие вещи таки не удавалась так просто в нем сделать, как в STL. Плюс еще в том, что при загрузке программы в ПЛК, она компилируется в STL и, соответственно, при выкачке ее из ПЛК на программатор она так же представлена в STL.
Вместо заключения

Программирование ПЛК занятие увлекательное, особенно когда это не стенд, а реальное оборудование.
Моя работа заключалась в создании программы на ПЛК для управления всей ГП машины либо отдельных ее частей, а так же загрузке программного обеспечения непосредственно в оборудование и его отладке.
Случалось разное, но работать с железом было очень интересно, хоть и не легко иногда.
А строили мы вот такие ГП машины:

