Программирование микроконтроллеров PIC16/PIC18 на языке C. Статья вторая. Базовые сведения о платформе. Первая программа
Если в первой статье все получилось хорошо — мы получили базовую программную обстановку для продолжения обучения.
Как я говорил ранее, пока что объяснять буду на базе МК PIC16F628A.
Обязательно качаем документацию на него. Рекомендую для поиска — alldatasheet.com
DataSheet — главный документ при разработке на базе МК.
Рекомендую распечатывать основные таблицы и разделы для удобства пользования.
Наиболее важные сведения о кристалле:
— максимальная рабочая частота — 20МГц;
— 2048х14 бит флеш-ПЗУ;
— 224 байта статической ОЗУ;
— 128 байт энергонезависимой ПЗУ;
— 16 доступных выводов;
— модуль приемо-передатчика;
— 3 таймера.
Данный кристалл — представитель так называемого среднего (Mid-range) семейства МК PIC.
Вкратце расскажу о том, что обязательно нужно понимать.
Память данных устройства разделена на 4 банка.
Банки содержат регистры специального назначения(SFR) и регистры общего назначения(GPR).
SFR — используются для управления устройством и его модулями.
Регистры обшего назначения представлены в виде статической ОЗУ, где мы можем хранить свои переменные.
Специальные регистры занимают по 32 начальные позиции в каждом банке.
В ДШ на страницах 18-21 показаны все регистры специального назначения. Распечатайте их — пригодится и не раз.
Это довольно таки объемная тема, и пропускать ее никак нельзя.
А с другой стороны нудноватая и неинтересная.
Пробуйте переосилить себя и прочитать об организации памяти и регистрах специального назначения в ДШ и у Шпака(упоминал в первой статье).
У данного устройства два порта: PORTA и PORTB.
Каждый вывод порта может использоваться непосредственно как простой вывод либо как вывод прочих модулей МК.
В самом начале ДШ вы должны были заметить что каждый вывод помимо основного названия, к примеру RB1, содержит еще и другое наименование RX и DT.
Вот здесь RX и есть второстепенная функция вывода — как вход приемо-передатчика.
Но пока мы не будем трогать периферийные модули устройства.
Каждый вывод порта может функционировать как вход или как выход.
Например, если нам нужно зажечь светодиод то вывод, к которому он подключен мы конфигурируем как выход, и выставляем на нем соответствующий уровень.
А вот если нам нужно подключить кнопку к порту и считывать факт нажатия, то здесь уже необходимо конфигурировать этот вывод как вход.
Конфигурация вход/выход осуществляется с помощью регистров TRIS.
Если в соответствующий бит регистра TRIS записать 1 то этот вывод станет входом, если 0 — выходом(видимо в связи с схожестью 1 и Input, а 0 и Output)
К примеру:
TRISA = 0; // Все выводы порта А — выходы
TRISB = 0xff; // Все выводы порта B — входы
TRISA5 = 1; // 5 вывод порта А — вход. Кстати не у всех компиляторов можно обращаться к каждому выводу непосредственно
Имена регистров можно посмотреть в папке «Папка HT-PICC\include» для соответствующего контроллера.
Для установления определенного уровня на выводе используем регистр PORT.
К примеру:
PORTA = 0; // Все выводы порта А с низким уровнем
PORTB = 0xff; // Все выводы порта B с высоким уровнем
RB5 = 1; // На пятом выводе порта B высокий уровень
Так. Достигаем момента когда неоходимо сделать отступление собственно по языку C.
Наверное напишу здесь небольшой пример. Скомпилируем. Запустим в Proteus, а о базовом языке C напишу в следующей статье.
Напишем небольшую программку. Помигаем светодиодом.
Пользуемся ранее созданным проектом, либо создаем новый, по схеме из первой статьи.
Для начала подключим файл заголовков.
Мы не выбираем конкретную модель, а указываем pic.h. Если открыть его то увидим скрипт выбора конкретного файла исходя из выбранного устройства при создании проекта.
Далее нам нужно инициализировать наши порты.
Создаем основную функцию программы:
TRISA = 0; // Порт А — все выводы выходы
PORTA = 0; // с логическим нулем
TRISB = 0; // Порт B — все выводы выходы
PORTB = 0; // С логическим нулем
Пойдем в «Папка HT-PICC\samples\delay».
Скопируем оттуда delay.c и delay.h и вставим их в папку проекта.
Добавим строку в начале:
#include «delay.c»
Мы будем использовать функцию DelayMs(x) для создания паузы между переключениями светодиода.
Допустим светодиод подключен к RB0.
Для его переключения будет использоваться логическое исключающее «ИЛИ»:
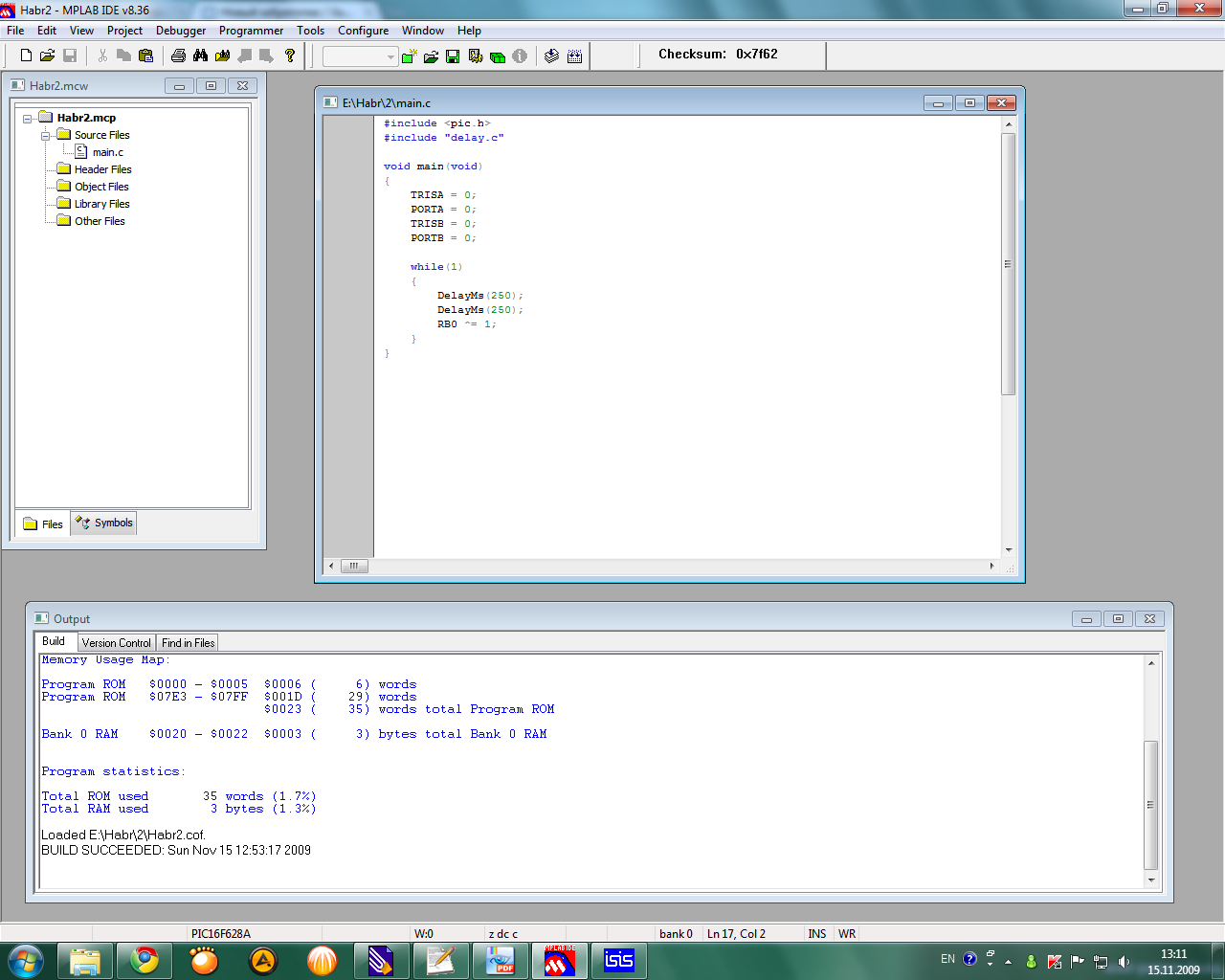
В итоге код принимает вид:
void main(void)
TRISA = 0;
PORTA = 0;
TRISB = 0;
PORTB = 0;
while(1)
DelayMs(250); // Сделаем паузу в полсекунды
DelayMs(250);
RB0 ^= 1; // инвертируем вывод
>
>
Прошивка готова.
Теперь настроим конфигурационные биты.
Жмем Configure -> Configuration bits.
Снимаем галку «Configuration Bits set in code», так как в коде мы ничего не выставляли.
Видим несколько пунктов.
Выставляем как на скрине.
Oscillator — HS — в качестве тактового генератора будет использоваться высокочастотный кварцевый резонатор.
WatchDog Timer — Off, если включить, то микроконтроллер будет периодически сбрасываться во избежание каких-либо зависаний. Нам такая возможность пока не нужна.
Power Up Timer — Enabled, МК будет находится в состоянии сброса, пока напряжение питания не достигнет необходимого порогового уровня.
Brown Out Detect — On, сброс МК, если произошло падение питающего напряжения ниже определенного уровня.
Low Voltage Program — Disabled, запрещаем использовать низковольтное внутрисхемное программирование МК. Здесь уже зависит от Вашего программатора.
Data EE Read Protect — Off, разрешаем чтение данных и EEPROM памяти МК.
Code Protect — Off, отключаем защиту кода в МК. Если выставить On — то невозможно будет считать программу из МК. Нам пока такая возможность не нужна.

Еще раз жмем F10.
Закрываем.
Прогоним программу в Proteus.
Запускаем Proteus ISIS.
Находясь в разделе Component mode жмем Pick from libraries и, пользуясь поиском, добавляем на форму компоненты:
— PIC16F628A;
— LED-RED;
— RES;

Два раза кликаем на каждом из них и выставляем параметры.
Для МК — выбираем файл прошивки *.hex из папки нашего проекта, и выставляем частоту 4МГц.
Для LED-RED выбираем Model type — Digital.
Для резистора выбираем сопротивление в 300 Ом.
Добавляем на форму Ground в разделе Terminals mode и соединияем как на скрине.
Жмем Play — светодиод должен мигать.
В следующей статье плотно пройдусь по языку C.
Вслед за ней будет статья по периферии контроллера и примеры кода для нее.
И за ней планирую рассказать о USB и PIC 18.
Вот такой план пока:-)
Программирование pic16f628a схема подключения
В основном написание этой статьи меня побудило желание рассказать интересующемуся человеку, да и самому не забыть, как самому что-нибудь собрать на PIC – контроллере. Начнем с программатор, без него ни как, для PIC контроллера, а затем соберем простое устройство под кодовым названием «помигаем» )). А дальнейшее развитее, это уже Ваша задача. Короче говоря моя задача «пнуть» Вас в определенном направлении)). Как меня в университете, а вот развиваться дальше это была моя задача.))
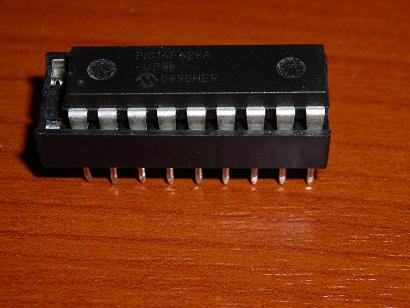
Честно сказать не знаю почему я остановился на модели PIC 16 F 628 A (Описание: RUS , ENG ) , но у него есть нужное для нас преимущество – это Flash память программы, то есть его можно перезаписать и встроенный осциллятор. Рекомендую контроллер в ставить в колодку чтобы не повредить выводы при частом вынимании, лучше пусть у колодки обломаются выводы.
В интернете распространена схема программатора представленная ниже, правда слегка под редактированная мною:
Программатор не требует внешнего питания. Принцип сборки программатора рассказывать не буду, думаю что сами справитесь))). Сам использовал для этого макетную плату:

Для подключения к ПК требуется полнофункциональный COM порт (на ноутбуках могут быть проблемы). В качестве ПО выбрана программа IC — Prog версии 1.05 D или 1.06 B (Ссылка), она была единственной работоспособной из всех опробованных. IC — Prog работает с операционными системами не выше Windows XP .
При первом запуске программа запросит ввести основные настройки. У меня они выглядели так:
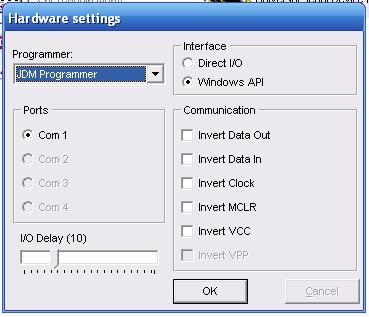
Если возникли какие-то проблемы, то это окно можно вызвать из самой программы.
Далее у нас появляется основное окно программы. В нем выбираем модель нашего контроллера , устанавливаем конфигурацию и открываем файл с HEX кодом программы (Ссылка). И вот что у нас должно получиться.
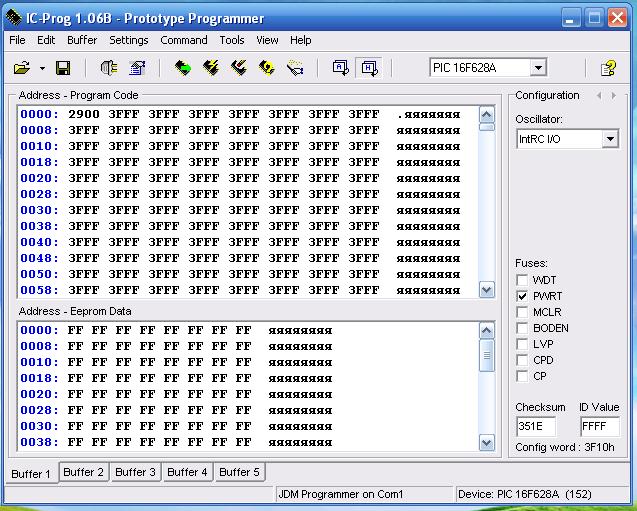
Затем жмем значке «макруха с молнии» и пишем наш микроконтроллер. И программка должна известить нас что запись прошла удачно. Если что то не так то скорее все косяк в монтаже программатора. У меня такое было))).
Сам код программы выглядит так на Ассемблере (Ссылка).
Написание данной программы происходило в специальной программе MPLAB 7.0 ( Архив 1,2,3,4,5,6 ) , бесплатно предоставляемой производителем микроконтроллера. Как ей пользоваться это уже отдельная песня, в интернете полно информации.
Но я все же коротко расскажу. И так:
- Устанавливаем программу и запускаем ее.
- Создаем новый проект — меню Project / Project Wizard, жмем далее .
- Выбираем модель нашего контроллера PIC 16 F 628 A , жмем далее.
- Жмем далее. Обычно здесь все нормально, но бывало что надо указать пути к файлам программы.
- Указываем имя и директорию проекта, жмем далее.
- Добавляем нужные файлы в проект если они есть. Жмем далее.
- Готово.
- Создаем файл кода программы – меню File / New . Перед нами появляется окно, вставляем в него код нашей программы и сохраняем файл с расширением . asm в директорию проекта.
- В рабочей области программы должно появиться окно с именем Имя_проекта. mcw , щелкаем правой кнопкой мыши по Source Files в этом окне после чего всплывает под меню и там щелкаем по Add . Далее выбираем наш файл с расширением . asm .
- Ну и собираем наш проект — меню Project / Built All . После чего появляется окошко в котором указываются ошибки, предупреждения и т.п. в проекте. Если ошибок нет то проект готов к прошивке в контроллер. Эта процедура обязательна при изменении кода программы.
- Также в программе есть полезные вещи, типа таких как монитор регистров и т.п.- меню View . А также полезная вещь при отладки программ, что то на подобие магнитофона – меню Debugger / Select Tool / MDLAB SIM .
- HEX код программы располагается в директории проекта и формируется автоматически.
Пойдем дальше для чего мы это делали. Вот схема нашего устройства.
Устройство «помигаем» предсталяет собой микроконтроллер с четырьмя светодиодами, которые циклически в бинарном исчислении считают до 15.
Вот видео как все работает. (Ссылка)
На деюсь у Вас все получилось. Так что начало есть, теперь осталось основываясь на Ваших хотелках развить все это дело, причем микроконтроллер это позволяет. Удачи вам.
Внимание. Автор статьи не несет ответственности за порчу вашего имущества. Все это вы делаете на свой страх и риск.
Автор IgoryOK