- Какое подходящее ПО для робота на 6 осей (механическая рука)
- #2 OFFLINE torvn77
- #3 OFFLINE inoy
- #4 OFFLINE Menu/Exit
- #5 OFFLINE yaso73
- #6 OFFLINE Insane
- #7 OFFLINE dpm
- #8 OFFLINE inoy
- #9 OFFLINE Ganch_er
- #10 OFFLINE Хочувсезнать
- Управление 6й осью робота
- Автоматический способ
- Фиксированный вектор
- Прямо к точке
- Траектория
- Ручной способ
- Русские Блоги
- Вы понимаете осевые и движение промышленных 6-осевых роботов?
- Программирование 6 осевого робота
- 7DOF Робот манипулятор рука 7ми осевой Инструкция сборка программирование
- Что такое DOF и почему 7
Какое подходящее ПО для робота на 6 осей (механическая рука)


- Из:Раменское
Отправлено 16 Февраль 2013 — 00:45
Подскажите пожалуйста для робота на 6 осей (механическая рука) какое ПО? Наверно можно МАЧ3 с серводвигателями и энкодерами но это не серьезно. Заранее благодарен.
#2  OFFLINE torvn77
OFFLINE torvn77

- Пол: Мужчина
- Из:Санкт-Петербурга
Отправлено 16 Февраль 2013 — 02:48
Предлагаю LinuxCNC,где-то читал,что она поддерживает до девяти осей.
Во вторых эта программа не монолитна,как принято на виндовсе,а куча независимых программулек,объединяемых HAL’ом в одно целое
(т.е. это программа конструктор, её топологию и логику работы можно менять).
Причём интерфейс этой программы тоже одна из программулек и может либо быть расщирен дополнительной конфигурацией,либо просто заменён,
что народ вроде как и делает.(про это точно не знаю.но скорее всего это так,как я это понял.).
Да и рукой ей вроде как управляли.
В целом точно сказать не могу,так как программа из-за своей универсальности очень сложная.
Ссылка на на «карьер»:
EMC2 — пояснялка от «чайника» • Станки с ЧПУ на форуме cnc-club.ru
EMC2 Integrators Manual Перевод на русский язык • Станки с ЧПУ на форуме cnc-club.ru
Сообщение отредактировал torvn77: 16 Февраль 2013 — 02:52
Я по мнению сообщества безграмотен,могу дать вредные или ошибочные советы.
Используйте их после обдумывания и на свой страх и риск.
У меня не всегда выходит понять вопрос,если это случилось то пожалуйста напишите мне об этом в личку.Ответ то я может и знаю,но пишу не то и не о том.
#3 OFFLINE inoy
- Из:Раменское
Отправлено 16 Февраль 2013 — 16:05
#4 OFFLINE Menu/Exit

- Пол: Мужчина
- Из:Москвы
Отправлено 16 Февраль 2013 — 17:01
Подскажите пожалуйста для робота на 6 осей (механическая рука) какое ПО? Наверно можно МАЧ3 с серводвигателями и энкодерами но это не серьезно. Заранее благодарен.
Для робота на 6 осей нужно ЧПУ на 6 осей.
ЧПУ бывают програмные, бывают аппаратные.
Сложность и стоимость зависят от поставленных задач.
Например система Delta Tau позволяет управлять до 128 осей.
Стоимость интерфейса на одну ось примерно 2000-4000 $.
Мач, точно не помню, но по моему 3+3 оси, демо вариант бесплатный, ограничение 1000 строк кода.
Про ЛинуксСНС, уже написали.
#5 OFFLINE yaso73

- Пол: Мужчина
- Город: Новосибирск
- Интересы: Очень люблю жить.Очень не люблю когда мне мешают этим заниматься.
- Из:Новосибирск
Отправлено 22 Февраль 2013 — 16:57
Все замечания и нравоучения носят исключительно юмористический характер.Ни коим образом не затрагивают честь и достоинство собеседника облезлого Кота с форточки.
Кто людям помогает — тот тратит время зря.
Хорошими делами прославиться нельзя.
#6 OFFLINE Insane
- Из:RnD
Отправлено 22 Февраль 2013 — 21:43
Настроить 6 осей — не проблема, запросто справится и Мач. Другое дело Cam и постпроцессинг, нужна относительно простая среда разработки УП.
#7 OFFLINE dpm
- Из:rf
Отправлено 11 Март 2013 — 21:20
Неправильно вы все говорите.
Хотя, по ходу дела автор темы уже ту-ту.
Здесь фестиваль совсем не бразильский.
На любимом трекере в прошлом году выкладывали программный
комплекс на такие роботы, он пристегивается к CATIA.
Имеет возможность обучения, т. е. можно вручную
проделать с роботом набор операций, и программа это запомнит.
#8 OFFLINE inoy
- Из:Раменское
Отправлено 12 Март 2013 — 02:30
Доброго времени суток. Вопрос поднял а появляюсь редко, извиняюсь. Спасибо за проявленное внимание.
Предполагал, что МАЧ3 с приводами с энкодерами можно задать движение, а затем програмно воспроизвести.
#9 OFFLINE Ganch_er

- Пол: Мужчина
- Город: КИЕВ
- Из:Киев
Отправлено 12 Март 2013 — 13:35
в инструкции на мач3 написано, что он может управлять 6 осями,
но если роботом на 6 осей — то не сможет.
#10 OFFLINE Хочувсезнать
- Пол: Не определился
- Из:Россия
Отправлено 13 Март 2013 — 01:27
Что вы все к мачу 3 привязались? Это простая и очень дешевая система, которая хоть и поддерживает хрен знает сколько осей, но имеет элементарную мат. модель. А вы про роботов на 6 осей. Тут дело далеко не в количестве поддерживаемых осей.
Сообщение отредактировал Хочувсезнать: 13 Март 2013 — 01:38
Управление 6й осью робота
Для позиционирования осевого инструмента (фреза, луч, струя) необходимо пять степеней свободы. Стандартный промышленный робот имеет 6 осей. В том случае если инструмент не соосен с осью вращения последнего сустава робота, то существует бесконечное множество вариантов позиционирования робота в определенную точку за счет поворота инструмента вокруг собственной оси. Это дает дополнительную гибкость в достижении труднодоступных зон, а также помогает обходить различного рода кинематические сингулярности и избегать механических столкновений узлов оборудования.
В системе SprutCAM предусмотрено два способа позиционирования оси 6го сустава:
Вы можете управлять этим через инспектор свойств операции.
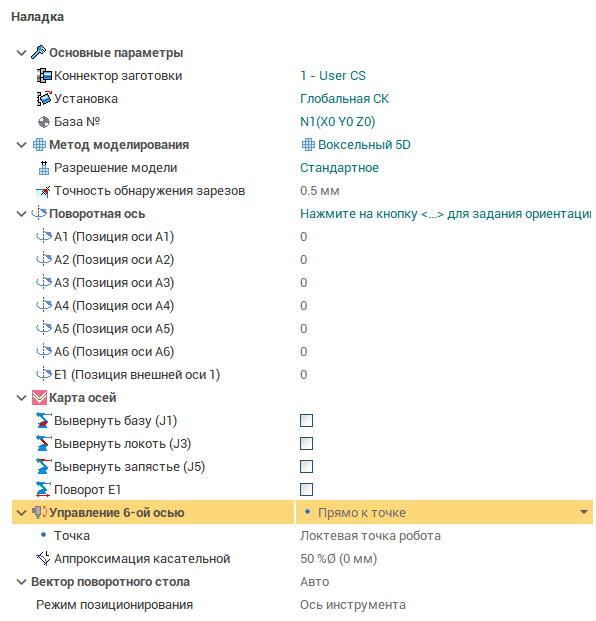
Автоматический способ
Автоматический способ представлен несколькими режимами управления 6-й осью.
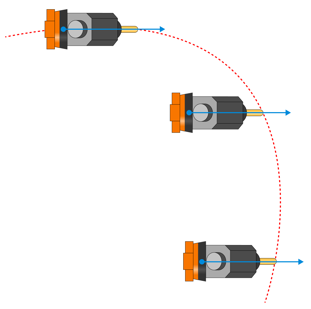
Фиксированный вектор
В этом режиме вы задаете ось (трехмерный вектор) вдоль которого будет выравниваться ось Z фланца робота (вектор фланца инструмента).
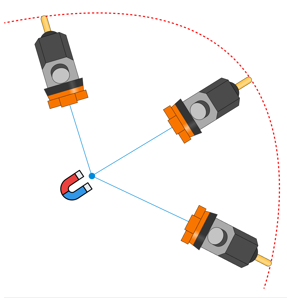
Прямо к точке
В данном режиме вы указываете 3d точку в которую должен быть направлен вектор фланца робота во время обработки.
Траектория
В этом режиме одна из осей СК инструмента выравнивается вдоль касательной к траектории в каждой точке.
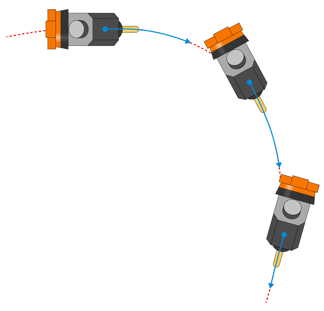
Опционально вы также можете задать Точность аппроксимации касательной и постоянное Угловое отклонение от касательной к траектории в каждой точке.
Ручной способ
Ручной способ программирования 6-й оси выполняется при помощи Карты осей робота.
Также возможно совмещение обоих способов: использование автоматического закона для большей части траектории и применение дополнительных коррекций 6-й оси в некоторых местах траектории при помощи Карты осей робота.
Русские Блоги
Вы понимаете осевые и движение промышленных 6-осевых роботов?
С социальным прогрессом, научно-техническим развитием промышленные роботы также чаще чаще. Промышленные роботы представляют собой автоматическое управление, повторяемые программируемые, многосеровые, многоцелевые операционные машины, которые имеют пространственную связь между свободой движения. Поведение его работы в основном путем заполнения линейного движения вдоль осей X, Y, Z. Из-за многих типов существует много интенсивных валов и систем координат, и это легко допустить ошибок, особенно для новичков.

Так называемая ось промышленного робота может быть объяснена профессиональным существительным, если робот имеет три степени свободы, то он может быть свободно подвижным вдоль оси X, Y, Z, но он не может быть наклонен или вращаться. Когда количество осей робота увеличивается, это более высокая гибкость для робота.
Промышленные роботы находятся в производстве, обычно должны быть оснащены периферийными устройствами в дополнение к собственной производительности, такие как вращающиеся заготовки, мобильные станции и т. Д. Контроль движения и расположения этих периферийных устройств необходимо соответствовать промышленному роботу и требует соответствующей точности. Обычно оси движения робота можно разделить на роботизированные оси, базовые валы и инструменты валы, базовые валы и инструменты валы.


Обычно используется в фактическом производстве, что 6 артефактов имеют шесть активных суставов (осей), а разные оси движения тела промышленного робота также различны. Ось, используемая для обеспечения того, чтобы конечный эффектор достигли произвольного положения рабочего пространства; ось для реализации любого пространственного отношения конечного эффектора, называемого валом наручного вала или вторичной оси.

Механическая структура шестиосевой совместной робота, шесть сервомоторов приводится напрямую через редуктор скорости, синхронный шкив и тому подобное, а вращение шести совместных валов приводится в действие. Шестьосе промышленные роботы обычно имеют 6 свобод, общие шестисеящие промышленные роботы включают вращение (S-ось), нижнюю руку (ось L), верхняя рука (u-ось), вращение запястья (ось R), запястье (Б) и вращение запястья (ось T). 6 Совместной синтез реализует конец 6 степени свободы.

Метод движения шестиосных совместных робота:
Шестиосный промышленный робот является наиболее широко используемым типом в применении промышленных роботов, с высокими духами, большой нагрузкой, высокой точностью позиционирования и т. Д. Каковы соответствующие пути движения шесть осей, и несколько июня подробно объяснят Fanuc Robot R-2000 IB.
J4 Вращение запястья (R-ось)
J6 Вращение запястья (Т-ось)
Отказ от ответственности: Эта статья перепечатана или адаптирована, авторское право принадлежит первоначальному автору. Если вы защищены авторским правом, пожалуйста, свяжитесь с этим!
Программирование 6 осевого робота
Главная Робототехника 7DOF Робот манипулятор рука 7ми осевой Инструкция сборка программирование
7DOF Робот манипулятор рука 7ми осевой Инструкция сборка программирование

Как собрать металлическую руку — робота манипулятора. На Aliexpress такие руки продаются в большом количестве. Но инструкции по сборке нет.
Тем более крайне сложно найти готовую программу для оживления такого робота манипулятора.
Собирем вместе и запустим 6ти осевую руку робота манипулятора с Arduino
Имеется робота манипулятор — рука с 7 осями. Робот почти собран, но еще не работает.

К сожалению, робот-манипулятор приходит из поднебесной в виде пакетов с множеством деталейи НИКАКОЙ ИНСТРУКЦИИ!
Наверное это правильно, незачем лезть в робототехнику, если не можешь собрать робота игрушку без инструкции. Где полет мысли, фантазии.
В следующих статьях поделючсь фото, этапами сборки робота-манипулятора, программированием.
Что такое DOF и почему 7
DOF (degrees of freedom англ.) — степеней свободы. Робот манипулятор 7DOF означает, что робот манипулятор с 7. степенями свободы или 7 осей поворота. Это много!