Графический метод решения ЗЛП
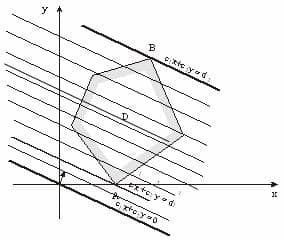
В линейном программировании используется графический метод, с помощью которого определяют выпуклые множества (многогранник решений). Если основная задача линейного программирования имеет оптимальный план, то целевая функция принимает значение в одной из вершин многогранника решений (см. рисунок).
Инструкция . Выберите количество строк (количество ограничений). Если количество переменных больше двух, необходимо систему привести к СЗЛП (см. пример и пример №2). Если ограничение двойное, например, 1 ≤ x1 ≤ 4 , то оно разбивается на два: x1 ≥ 1 , x1 ≤ 4 (т.е. количество строк увеличивается на 1).
Построить область допустимого решения (ОДР) можно также с помощью этого сервиса.
Решение матричной игры
С помощью сервиса в онлайн режиме можно определить цену матричной игры (нижнюю и верхнюю границы), проверить наличие седловой точки, найти решение смешанной стратегии методами: минимакс, симплекс-метод, графический (геометрический) метод, методом Брауна.
- На плоскости X10X2 строят прямые.
- Определяются полуплоскости.
- Определяют многоугольник решений;
- Строят вектор N(c1,c2), который указывает направление целевой функции;
- Передвигают прямую целевую функцию c1x2 + c2x2 = 0 в направлении вектора N до крайней точки многоугольника решений.
- Вычисляют координаты точки и значение целевой функции в этой точке.
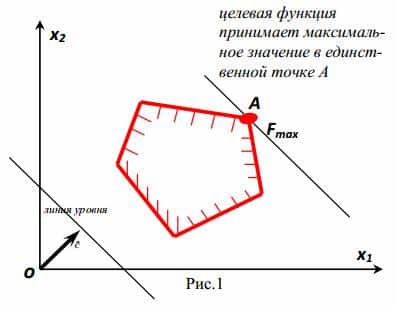
- Целевая функция принимает экстремальное (минимальное или максимальное) значение в единственной точке А.
- Сформулировать математическую модель задачи линейного программирования.
- Решить задачу линейного программирования графическим способом (для двух переменных).
Если количество переменных в задаче линейного программирования больше двух, то задачу предварительно сводят к стандартной ЗЛП.
F(X) = 3x1 — 2x2 + 5x3 — 4x5 → max при ограничениях:
x1 + x2 + x3=12
2x1 — x2 + x4=8
— 2x1 + 2x2 + x5=10
F(X) = 3x1 — 2x2 + 5x3 — 4x5
Переход к СЗЛП.
Расширенная матрица системы ограничений-равенств данной задачи:
| 1 | 1 | 1 | 0 | 0 | 12 |
| 2 | -1 | 0 | 1 | 0 | 8 |
| -2 | 2 | 0 | 0 | 1 | 10 |
Приведем систему к единичной матрице методом жордановских преобразований.
1. В качестве базовой переменной можно выбрать x3.
2. В качестве базовой переменной можно выбрать x4.
3. В качестве базовой переменной можно выбрать x5.
Поскольку в системе имеется единичная матрица, то в качестве базисных переменных принимаем X = (3,4,5).
Соответствующие уравнения имеют вид:
x1 + x2 + x3 = 12
2x1 — x2 + x4 = 8
— 2x1 + 2x2 + x5 = 10
Выразим базисные переменные через остальные:
x3 = — x1 — x2+12
x4 = — 2x1 + x2+8
x5 = 2x1 — 2x2+10
Подставим их в целевую функцию:
F(X) = 3x1 — 2x2 + 5(- x1 — x2+12) — 4(2x1 — 2x2+10)
или
F(X) = — 10x1 + x2+20 → max
Система неравенств:
— x1 — x2+12 ≥ 0
— 2x1 + x2+8 ≥ 0
2x1 — 2x2+10 ≥ 0
Приводим систему неравенств к следующему виду:
x1 + x2 ≤ 12
2x1 — x2 ≤ 8
— 2x1 + 2x2 ≤ 10
F(X) = — 10x1 + x2+20 → max
Особенности решения задач линейного программирования графическим методом
Переменную x2 принимаем в качестве дополнительной переменной и делаем замену на знак «≥»:
f=x1 + 6x3+ 27
x1 + 3x3≥6
Далее задача решается графическом способом.
Пример №2
F(X) = 3x1 — 2x2 + 5x3 — 4x5 → max при ограничениях:
x1 + x2 + x3=12
2x1 — x2 + x4=8
— 2x1 + 2x2 + x5=10
F(X) = 3x1 — 2x2 + 5x3 — 4x5
Переход к СЗЛП.
Расширенная матрица системы ограничений-равенств данной задачи:
| 1 | 1 | 1 | 0 | 0 | 12 |
| 2 | -1 | 0 | 1 | 0 | 8 |
| -2 | 2 | 0 | 0 | 1 | 10 |
Приведем систему к единичной матрице методом жордановских преобразований.
1. В качестве базовой переменной можно выбрать x3.
2. В качестве базовой переменной можно выбрать x4.
3. В качестве базовой переменной можно выбрать x5.
Поскольку в системе имеется единичная матрица, то в качестве базисных переменных принимаем X = (3,4,5).
Соответствующие уравнения имеют вид:
x1 + x2 + x3 = 12
2x1 — x2 + x4 = 8
— 2x1 + 2x2 + x5 = 10
Выразим базисные переменные через остальные:
x3 = — x1 — x2+12
x4 = — 2x1 + x2+8
x5 = 2x1 — 2x2+10
Подставим их в целевую функцию:
F(X) = 3x1 — 2x2 + 5(- x1 — x2+12) — 4(2x1 — 2x2+10)
или
F(X) = — 10x1 + x2+20 → max
Система неравенств:
— x1 — x2+12 ≥ 0
— 2x1 + x2+8 ≥ 0
2x1 — 2x2+10 ≥ 0
Приводим систему неравенств к следующему виду:
x1 + x2 ≤ 12
2x1 — x2 ≤ 8
— 2x1 + 2x2 ≤ 10
F(X) = — 10x1 + x2+20 → max
- Составить систему математических зависимостей (неравенств) и целевую функцию.
- Изобразить геометрическую интерпретацию задачи.
- Найти оптимальное решение.
- Провести аналитическую проверку.
- Определить существенные и несущественные ресурсы и их избытки.
- Определить значение целевой функции.
- Вычислить объективно обусловленные оценки.
- Составить соотношение устойчивости.
Вопрос № 9. Этапы решения ЗЛП графическим методом (алгоритм решения)
Если задача линейного программирования содержит только две переменные, то ее можно решить графическим методом, выполняя следующие операции:
1. Строим все полуплоскости, соответствующие ограничениям системы.
2. Находим область допустимых решений (ОДР), как множество точек, в котором пересекаются все построенные полуплоскости.
3. Строим вектор , выходящий из начала координат, где и – это коэффициенты при неизвестных в целевой функции . Этот вектор указывает направление возрастания целевой функции.
4. Перпендикулярно вектору проводим так называемую линию уровня (т.е. прямую , проходящую через начало координат).
5. Перемещаем линию уровня параллельно самой себе в направлении вектора (если задача на максимум (max)) или в противоположном направлении (если задача на минимум (min)) до тех пор, пока линия уровня имеет хотя бы одну общую точку с ОДР.
6. Находим координаты этой общей крайней точки, решая систему уравнений прямых, на пересечении которых она находится.
7. Подставляем эти координаты в целевую функцию и находим ее max (или min).
Вопрос № 10. Алгоритм симплексного метода решения ЗЛП:
1. Привести задачу к каноническому виду
2. Найти начальное опорное решение с «единичным базисом» (если опорное решение отсутствует, то задача не имеет решение ввиду несовместимости системы ограничений)
3. Вычислить оценки разложений векторов по базису опорного решения и заполнить таблицу симплексного метода
4. Если выполняется признак единственности оптимального решения, то решение задачи заканчивается
5. Если выполняется условие существования множества оптимальных решений, то путем простого перебора находят все оптимальные решения
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями:
Этапы решения графического метода задач линейного программирования
Пусть задача линейного программирования задана в двумерном пространстве, т. е. ограничения содержат две переменные, т.е. она может быть решена графически. Графический метод решения ЗЛП состоит из следующих этапов.
Сначала на координатной плоскости x1Ox2 строится допустимая многоугольная область (область допустимых решений, область определения), соответствующая ограничениям.
При этом могут быть получены следующие области:
- Основной случай – получающаяся область имеет вид ограниченного выпуклого многоугольника (рис. 2.2, а).
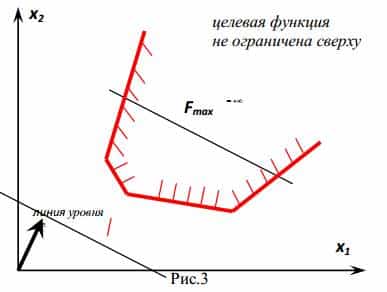
- Неосновной случай – получается неограниченный выпуклый многоугольник, имеющий вид, подобный изображенному на рис. 2.2, б.
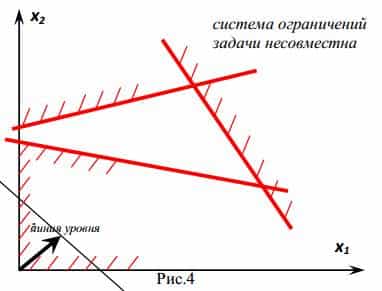
- Возможен случай, когда неравенства противоречат друг другу и допустимая область вообще пуста.
Рис. 2.2. Области определения решения:
а – основной случай, б – неосновной случай
Строится вектор , показывающий направление целевой функции. Этот вектор показывает направление наискорейшего изменения целевой функции. Прямая , перпендикулярная вектору–градиенту, является линией уровня целевой функции. В любой точке линии уровня целевая функция принимает одно и то же значение.
Приравняем целевую функцию постоянной величине “a”. Меняя значение “a”, получим семейство параллельных прямых, каждая из которых является линией уровня.
Важное свойство линии уровня линейной функции состоит в том, что при параллельном смещении линии в одну сторону уровень только возрастает, а при смещении в другую сторону – убывает.
При поиске максимума ЦФ необходимо передвигать целевую прямую в направлении вектора , при поиске минимума ЦФ – против направления вектора . Последняя по ходу движения вершина ОДР будет точкой максимума или минимума ЦФ.
Вычисляют координаты точки и значение целевой функции в этой точке. Для нахождения ее координат достаточно решить два уравнения прямых, получаемых из соответствующих ограничений и дающих в пересечении точку максимума.
Если такой точки (точек) не существует, то можно сделать вывод о неограниченности ЦФ на множестве планов сверху (при поиске максимума) или снизу (при поиске минимум).
Пример. Решить задачу линейного программирования графическим способом.
Вернемся к целевой функции: . Допустим, значение функции L = 1 (абсолютно произвольно выбранное число), тогда . Данное уравнение является уравнением прямой на плоскости. Известно, что данная прямая перпендикулярна вектору, координатами которого являются коэффициенты функции, а именно вектору .
Следовательно, с геометрической точки зрения, исходная функция L изображается как множество прямых, перпендикулярных вектору .
Рис. 2.3. Допустимая область решения
Построим вектор , который изображен на рис. 2.3. Видно, что значение функции будет возрастать при перемещении прямой в направлении вектора . Будем перемещать прямую, перпендикулярную вектору , до тех пор, пока она полностью не пройдет область допустимых решений. В нашем случае касание прямой перед выходом из области допустимых решений произойдет в точке пересечении прямых и . В данной точке значение функции будет наибольшим.
Решая совместно эти два уравнения, получим координаты этой точки x1 = 1; x2 = 2. При этом значение целевой функции , что и дает ее максимальное значение.
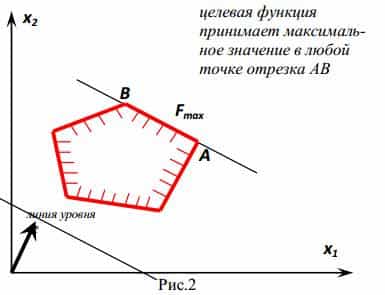
Следует обратить внимание на то, что оптимальный план, как правило, соответствует какой-то вершине многоугольника, изображающего допустимую область. Но может случиться так, что решение не будет единственным. Но и в этом случае вершины, соответствующие границам этой стороны, дают оптимальные планы нашей задачи линейного программирования. Таким образом, вершины допустимой области играют в решении задач линейного программирования особую роль. Если допустимая область не ограничена, то и значение целевой функции может быть неограниченным.
Подводя итог, можно сформулировать следующие положения:
- Допустимая область – это выпуклый многоугольник.
- Оптимум достигается в вершине допустимой области (если допустимая область ограничена и не пуста).
- Ограниченность целевой функции в допустимой области является необходимым и достаточным условием разрешимости задачи.