Симплекс-метод: случай, когда система не имеет ни одного решения
В примере, рассмотренном в статье «Симплекс-метод решения задач линейного программирования: типичный пример и алгоритм», система ограничений была совместной и имелся конечный оптимум, причём единственный. В этой статье проиллюстрирован случай, когда одно из условий нарушается: система несовместна, то есть, не имеет ни одного решения, в том числе и оптимального.
Пример. Найти максимум функции при ограничениях
Сведём систему ограничений-неравенств к системе уравнений путём введения неорицательных добавочных переменных:
Переменные , , примем за основные. Соответствующее базовое решение (0; 0; -9; -2; 8) — недопустимое. Поэтому прежде всего воспользуемся симплексным методом для нахождения допустимого базисного решения.
Шаг I. Основные переменные: , , ; неосновные переменные , . Выразим основные переменные через неосновные (линейную форму пока не рассматриваем):
Переводим в основные переменные. Полагаем . При имеем и переходит в неосновные переменные.

Шаг II. Основные переменные , , ; неосновные переменные , . Снова выразив основные переменные через неосновные, приходим к системе
Во втором уравнении полученной системы и свободный член, и все коэффициенты при неосновных переменных отрицательны. Это является признаком того, что данная система несовместна. Она не имеет ни одного решения, в том числе и оптимального.
Неограниченные решения
В некоторых задачах ЛП значения переменных могут неограниченно возрастать без нарушения ограничений. Это говорит о том, что пространство допустимых решений не ограничено, по крайней мере, по одному направлению. В результате этого целевая функция может возрастать (задача максимизации) или убывать (задача минимизации) неограниченно.
Неограниченность решения задачи свидетельствует только об одном: модель разработана не достаточно корректно. Типичные ошибки, приводящие к построению таких моделей, заключаются в том, что не учитываются ограничения, не являющиеся избыточными, и не точно оцениваются параметры (коэффициенты) ограничений.
В следующем примере показано, как на основе данных, приведенных в симплекс-таблице, можно определить, когда не ограничено пространство решений и значения целевой функции.
Пример 8. (Неограниченная целевая функция)
Рассмотрим следующую задачу ЛП.

Максимизировать при ограничениях
Симплекс-таблица начальной итерации этой задачи имеет следующий вид.
Из этой таблицы видно, что в качестве вводимой переменной можно взять как 1, так и 2. Поскольку переменная 1 имеет максимальный (по абсолютной величине) отрицательный коэффициент в W()-строке, именно ее следует ввести в базисное решение. Однако заметим, что во всех ограничениях коэффициенты, стоящие перед переменной 2 отрицательны или равны нулю. Это означает, что значение переменной 2 может возрастать до бесконечности, и при этом не нарушается ни одно ограничение. Поскольку увеличение на 1 значения переменной 2 приводит к увеличению на 1 значения целевой функции, значит, неограниченное увеличение значения переменной 2 ведет к неограниченному увеличению значения целевой функции. Эта ситуация проиллюстрирована на рис. 4.2.4. На этом рисунке видно, что пространство допустимых решений не ограничено в направлении оси 2 и значение целевой функции может быть каким угодно большим.

Правило выявления неограниченности решения следующее.
Если на какой-либо симплекс — итерации коэффициенты в ограничениях для какой-нибудь небазисной переменной будут неположительными, значит, пространство решений не ограничено в направлении возрастания этой переменной. Кроме того, если коэффициент этой переменной в W()-строке отрицателен, когда рассматривается задача максимизации, или положителен в задаче минимизации, целевая функция также не ограничена.
Отсутствие допустимых решений
Если ограничения задачи ЛП несовместны (т.е. они не могут выполняться одновременно), то задача не имеет допустимых решений. Такая ситуация не может возникнуть, если все неравенства, составляющие систему ограничений, имеют тип «» с неотрицательными правыми частями, так как в этом случае дополнительные переменные могут составить допустимое решение. Для других типов ограничений мы используем искусственные переменные. И хотя в оптимальном решении все искусственные переменные в силу штрафов равны нулю, такой исход возможен только тогда, когда задача имеет непустое пространство допустимых решений. В противном случае в оптимальном решении будет присутствовать хотя бы одна положительная искусственная переменная.
С практической точки зрения отсутствие допустимых решений свидетельствует о том, что задача плохо сформулирована.
Пример 9. (Отсутствие допустимых решений)
Рассмотрим следующую задачу ЛП.

Максимизировать при ограничениях
Результат применения симплекс-метода представлен в следующей таблице.
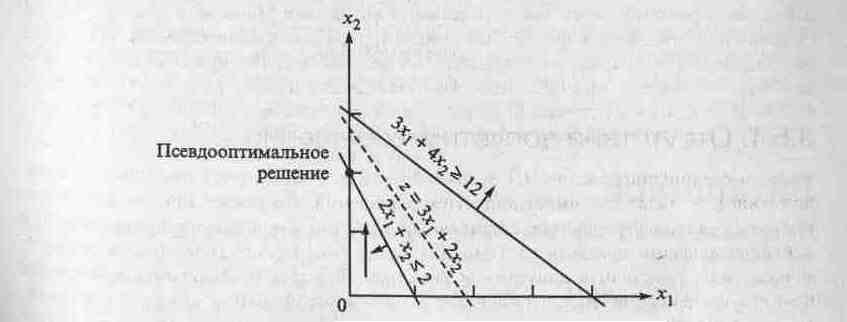
Данные из этой таблицы показывают, что в точке оптимума искусственная переменная R имеет положительное значение (= 4), что свидетельствует об отсутствии допустимого решения. На рис. 4.2.5 графически представлена ситуация данной задачи. Алгоритм симплекс-метода, допуская положительные значения искусственной переменной, по существу, превращает неравенство 3 1+4 3 12 в 3 1+4 3 12. (Объясните, почему так происходит.) В результате получаем то, что можно назвать псевдо оптимальным решением.
Исходную задачу линейного программирования называют прямой. Существует также двойственная задача ЛП, формулируемая путем симметричных структурных преобразований прямой задачи с помощью определенных правил.
Правила формирования переменных и ограничений двойственной задачи ЛП [19].
- Каждому из m ограничений прямой задачи соответствует переменная двойственной задачи.
- Каждой из переменных прямой задачи соответствует ограничение двойственной задачи.
- Коэффициенты при какой-либо переменной в ограничениях прямой задачи становятся коэффициентами ограничения двойственной задачи, соответствующей этой переменной, а правая часть формируемого ограничения равна коэффициенту при этой переменной в выражении целевой функции.
- Коэффициенты целевой функции двойственной задачи равны правым частям ограничений прямой задачи.
- Поиск экстремума целевой функции двойственной задачи меняется на поиск противоположного экстремума по сравнению с прямой задачей.
Пример 9. (Прямая и двойственная задача линейного программирования)
| Прямая задача | Прямая задачав стандартной форме | Двойственныепеременные |
Максимизировать  при ограничениях при ограничениях    | Максимизировать  при ограничениях при ограничениях    |   |
Двойственная задача Минимизировать  при ограничениях
при ограничениях


