- Раздел 3
- Особенности задач динамического программирования
- Динамическое программирование
- Процесс разработки алгоритмов динамического программирования
- Оптимальная подструктура
- Отсутствие оптимальной подструктуры
- Оптимальность для подзадач
- Принцип оптимальности на префиксе
- Примеры задач
- Принцип оптимальности на подотрезках
- Примеры задач
- Принцип оптимальности на подмножествах
- Примеры задач
- Мемоизация
- См.также
- Источники информации
Раздел 3
Динамическое программирование (иначе – динамическое планирование) – это метод нахождения оптимальных решений в задачах с многошаговой (многоэтапной) структурой. Многие экономические процессы расчленяются на шаги естественным образом. Это все процессы планирования и управления, развивающиеся во времени. Естественным шагом в них может быть год, квартал, месяц, декада, неделя, день и т.д. Однако метод динамического программирования может использоваться при решении задач, где время вообще не фигурирует; разделение на шаги в таких задачах вводятся искусственно. Поэтому «динамика» задач динамического программирования заключается в методе решения.
В экономической практике встречается несколько типов задач, которые по постановке или способу решения относятся к задачам динамического программирования. Это задачи оптимального перспективного и текущего планирования во времени. Их решают либо путем составления комплекса взаимосвязанных статических моделей для каждого периода, либо путем составления единой динамической задачи оптимального программирования с применения многошаговой процедуры принятия решений.
В общей постановке задача динамического программирования формулируется следующим образом. Имеется некоторая управляемая физическая система , характеризующаяся определенным набором параметров. В этой системе происходят какие-то процессы (экономические, производственные, технологические и т.п.), которые можно представить как многошаговые. На каждом шаге процессам в системе соответствуют определенные значения параметров, описывающих состояние системы. Заданы условия, позволяющие определять или начальное, или конечное состояние системы, или оба этих состояния. Иногда задаются области начальных и конечных состояний. Поскольку управление системой осуществляется для достижения конкретной цели, то указан показатель эффективности управления, называемый целевой функцией, численно выражающий эффект («выигрыш»), получаемый при том или ином управлении на множестве допустимых управлений. В экономических системах целевая функция может определять прибыль, затраты, рентабельность, объем производства и т.д. Задача динамического программирования состоит в выборе из множества допустимых управлений такого, которое переводит систему из начального состояния в конечное, обеспечивая при этом целевой экстремум (минимум или максимум в зависимости от ее экономической сути). Упомянутое управление называют оптимальным.
Методом динамического программирования решаются следующие задачи: задача о минимизации расхода горючего, задача о выборе кратчайшего пути, задача распределения ресурсов, задача о замене оборудования и т.д.
Особенности задач динамического программирования
Таким образом, на основании выше изложенного можно выделить типичные особенности многошаговых задач.
1. Рассматривается система, состояние которой на каждом шаге определяется вектором . Дальнейшее изменение ее состояния зависит только от данного состояния и не зависит от того, каким путем система пришла в него. Такие процессы называются процессами без последействия.
2. На каждом шаге выбирается одно решение , под действием которого система переходит из предыдущего состояния в новое . Это новое состояние является функцией состояния на начало интервала и принятого в начале интервала решения , т.е.
3. Действие на каждом шаге связано с определенным выигрышем (доходом, прибылью) или потерей (издержками), которые зависят от состояния на начало шага (этапа) и принятого решения.
4. На векторы состояния и управления могут быть наложены ограничения, объединение которых составляет область допустимых решения .
5. Требуется найти такое допустимое управление для каждого шага , чтобы получить экстремальное значение функции цели за все шагов.
Любую допустимую последовательность действия для каждого шага, переводящую систему из начального состояния в конечное, называют стратегией управления. Допустимая стратегия управления, доставляющая функции цели экстремальное значение, называется оптимальной.
Динамическое программирование
Процесс разработки алгоритмов динамического программирования
В процессе составления алгоритмов динамического программирования, требуется следовать последовательности из четырёх действий:
- Описать структуру оптимального решения.
- Рекурсивно определить значение оптимального решения.
- Вычислить значение оптимального решения с помощью метода восходящего анализа.
- Составить оптимальное решение на основе полученной информации.
Оптимальная подструктура
Задача имеет оптимальную подструктуру, если её оптимальное решение может быть рационально составлено из оптимальных решений её подзадач.

Наличие оптимальной подструктуры в задаче используется для определения применимости динамического программирования и жадных алгоритмов для решения оной. Например, задача по нахождению кратчайшего пути между некоторыми вершинами графа содержит в себе оптимальное решение подзадач.
Многие задачи, решаемые динамическим программированием, можно определить как поиск в заданном ориентированном ациклическом графе кратчайшего пути от одной вершины к другой.

Отсутствие оптимальной подструктуры
Иногда оптимальная подструктура может отсутствовать в задаче. Рассмотрим задачу, в которой имеется ориентированный граф $G = (V, E)$ и вершины $u, v \in V$, задачу по определению простого пути от вершины $u$ к вершине $v$, состоящий из максимального количества рёбер.
Рассмотрим путь $q \rightarrow r \rightarrow t$, который является самым длинным простым путем $q \rightsquigarrow t$. Является ли путь $q \rightarrow r$ самым длинным путем $q \rightsquigarrow r$? Нет, поскольку простой путь $q \rightarrow s \rightarrow t \rightarrow r$ длиннее. Является ли путь $r \rightarrow t$ самым длинным путем $r \rightsquigarrow t$? Снова нет, поскольку простой путь $r \rightarrow q \rightarrow s \rightarrow t$ длиннее. Таким образом, в задаче о поиске самого длинного невзвешенного пути не возникает никаких оптимальных подструктур. Для этой задачи до сих пор не найдено ни одного эффективного алгоритма, работающего по принципу динамического программирования. Фактически, это NP-полная задача, т.е. вряд ли ее можно решить в течение полиномиального времени.
Оптимальность для подзадач
Важнейшее свойство задач, которое позволяет решать их с помощью динамического программирования, это оптимальность для подзадач. В зависимости от формулировки задачи, будь то динамическое программирование на отрезке, на префиксе, на дереве, термин оптимальности для подзадач может быть различным, но, в целом, формулируется так: если есть оптимальное решение для некоторой подзадачи, которая возникает в процессе решения задачи, то именно его нужно использовать для решения задачи в целом.
Принцип оптимальности на префиксе
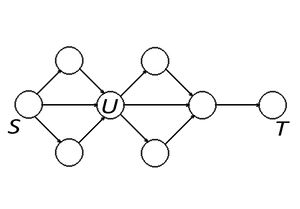
Рассмотрим некий необратимый процесс производства и представим его в виде ориентированного и ациклического графа. Процесс проходит некий ряд состояний. Началом производства (первым состоянием) обозначим вершину графа $S$, а конец производства (последнее состояние) $T$. Процесс требует оптимизации, т.е. требуется найти оптимальный путь $S \rightsquigarrow T$. Он проходит через вершину графа $U$. Префикс оптимального пути $S \rightsquigarrow U$ является оптимальным путём $S \rightsquigarrow U$. Теперь рассмотрим принцип оптимальности для динамического программирования на префиксе. Итак, имеем некоторый оптимальный путь $S \rightsquigarrow T$, который проходит через $U$. Пусть префикс $ \Delta U$, т.е. путь от $S \rightsquigarrow U$, неоптимален. Тогда заменим неоптимальную часть $S \rightsquigarrow U$ пути $S \rightsquigarrow T$ оптимальной, а путь $U \rightsquigarrow T$ добавим в конец. Получим оптимальный путь $S \rightsquigarrow T$. Принцип оптимальности для подзадач выполняется. Т.е. чтобы получить оптимальный путь из одной вершины графа в другую, префиксы меньших путей должны быть оптимальными.
В качестве примера рассмотрим следующую задачу: пусть дан ациклический ориентированный взвешенный граф, требуется найти вес кратчайшего пути из u в v. Воспользуемся принципом оптимальности на префиксе.
Пусть [math]d[/math] — функция, где [math]d(i)[/math] — вес кратчайшего пути из [math]u[/math] в [math]i[/math] . Ясно, что [math]d(u)[/math] равен [math]0[/math] . Пусть [math]w(i, j)[/math] — вес ребра из [math]i[/math] в [math]j[/math] . Будем обходить граф в порядке топологической сортировки. Получаем следующие соотношения:
Так как мы обходим граф в порядке топологической сортировки, то на [math]i[/math] -ом шаге всем [math]d(j)[/math] ( [math]j[/math] такие, что существует ребро из [math]j[/math] в [math]i[/math] ) уже присвоены оптимальные ответы, и, следовательно, [math]d(i)[/math] также будет присвоен оптимальный ответ.
Примеры задач
Принцип оптимальности на подотрезках
Требуется посчитать функцию $f(1, n)$. Принцип состоит в следующем: пусть для всех отрезков $i$, $j$ (где [math] u \leqslant i \leqslant j \leqslant v [/math] ) известен оптимальный ответ для функции $f(i, j)$. Тогда мы будем вычислять $f(u, v)$ через такие $f(i, j)$. В качестве примера рассмотрим следующую классическую задачу: дана строка длины n, нужно найти максимальный подпалиндром (подпоследовательность максимальной длины, которая является палиндромом). Пусть $d(i, j)$ — ответ на задачу для подстроки, начинающаяся с символа $i$ и заканчивающаяся в символе $j$. Ясно, что $d(i, j) = 0$ для всех $i, j,$ таких что $i > j$ и $d(i, i) = 1$ для всех $i$. Пусть нам нужно посчитать значение для $d(i, j)$, причем значение $d$ для всех $l, r$, таких что [math] i \leqslant l \leqslant r \leqslant j [/math] уже посчитаны и они оптимальны. Рассмотрим два случая:
- [math] s(i) \neq s(j) [/math] , тогда [math] d(i, j) = \max(d(i, j — 1), d(i + 1, j)) [/math]
- [math] s(i) = s(j) [/math] , тогда [math] d(i, j) = d(i + 1, j — 1) + 2 [/math]
- Так [math]s(i) \neq s(j)[/math] , символы $s(i)$ и $s(j)$ не могут входить в максимальный подпалиндром одновременно, то есть либо $s(i)$ входят в максимальный подпалиндром(тогда его длина $d[i, j — 1]$), либо $s(j)$ входит в максимальный подпалиндром (тогда его длина $d[i + 1, j]$), либо оба не входят в максимальный подпалиндром (тогда его длина $= d[i, j — 1] = d[i + 1, j]$).
- Данное равенство следует из факта, что выгодно включить в максимальный подпалиндром символы $s(i)$ и $s(j)$.
Примеры задач
Принцип оптимальности на подмножествах
Требуется посчитать функцию [math]f(A)[/math] , где [math]A[/math] — некоторое множество. Принцип состоит в следующем: пусть для всех множеств [math]B[/math] (где [math]B \in A[/math] ) известен оптимальный ответ для функции [math]f(B)[/math] . Тогда будем вычислять [math]f(A)[/math] через такие [math]f(B)[/math] . В качестве примера рассмотрим задачу о коммивояжере.
Обозначим [math]d[i][mask][/math] как наименьшую стоимость пути из вершины [math]i[/math] в вершину [math]0[/math] , проходящую (не считая вершины [math]i[/math] ) единожды по всем тем и только тем вершинам [math]j[/math] , для которых [math]mask_j = 1[/math] (т.е. [math]d[i][mask][/math] уже найденный оптимальный путь от [math]i[/math] -ой вершины до [math]0[/math] -ой, проходящий через те вершины, где [math]mask_j=1[/math] . Если [math]mask_j=0[/math] ,то эти вершины еще не посещены). Тогда воспользуемся принципом оптимальности на подмножествах. Стоимостью минимального гамильтонова цикла в исходном графе будет значение [math] d[0][2^n-1][/math] — стоимость пути из [math]0[/math] -й вершины в [math]0[/math] -ю, при необходимости посетить все вершины.
Примеры задач
Мемоизация
| Определение: |
| Мемоизация (англ. memoization) — сохранение результатов выполнения функций для предотвращения повторных вычислений. |
Это один из способов оптимизации, применяемый для увеличения скорости выполнения компьютерных программ. Перед вызовом функции проверяется, вызывалась ли функция ранее:
- если не вызывалась, функция вызывается и результат её выполнения сохраняется;
- если вызывалась, используется сохранённый результат.
В качестве примера рассмотрим задачу о нахождении числа Фибоначчи под номером [math]n[/math] . Без мемоизации:
int Fibonacci(int n): if n return 1 a = Fibonacci(n - 1) b = Fibonacci(n - 2) return a + b
int Fibonacci(int n): if n return 1 if fib[n] == -1 // проверка на то, не посчитали ли мы это число раньше; посчитанные числа хранятся в массиве fib fib[n] = Fibonacci(n - 1) + Fibonacci(n - 2) return fib[n]
См.также
Источники информации
- Т. Кормен. «Алгоритмы. Построение и анализ» второе издание, Глава 15
- T. H. Cormen. «Introduction to Algorithms» third edition, Chapter 15
- Wikipedia — Optimal substructure
- Wikipedia — Greedy algorithm
- Wikipedia — Dynamic programming
- Wikipedia — Memoization
- Википедия — Жадный алгоритм
- Википедия — Динамическое программирование
- Википедия — Мемоизация