- 5. Формы представления задач линейного программирования
- 6. Структура допустимого множества и типы решений задач линейного программирования
- 7. Типы решений
- 8. Понятие двойственной задачи
- 9. О методах решения задач линейного программирования
- Теоретические основы поиска оптимального решения задачи линейного программирования.
- Достоинства и недост лин. Моделей задачи планированияпроизв-ти.
- Графический метод решения задачи лп.
- Графическая интерпретация случая неограниченной целевой функции.
5. Формы представления задач линейного программирования
- Стандартная форма на максимум:

- Стандартная форма на минимум:

- Каноническая форма представления:

6. Структура допустимого множества и типы решений задач линейного программирования
Каждое функциональное ограничение, входящее в формальную запись задачи линейного программирования, представляет собой некоторые замкнутые полупространства размерности n (при условии ограничения в виде неравенства). Если ограничения заданы в виде равенства, то оно отображается гиперплоскостью в n-мерном пространстве. Прямые ограничения  образуют также замкнутые полупространства. Следовательно, допустимое множество задач линейного программирования задается системой ограничений и представляет собой пересечение замкнутых полупространств и/или гиперплоскостей. Такое образование называетсямногогранным множеством. Многогранное множество всегда замкнуто и выпукло, но в частном случае может быть пустым или неограниченным, а размерность его может составлять n или менее. Рассмотрим примеры формирования допустимого множества для n=2, тогда все рассуждения будут рассматриваться на плоскости. Пример 1
образуют также замкнутые полупространства. Следовательно, допустимое множество задач линейного программирования задается системой ограничений и представляет собой пересечение замкнутых полупространств и/или гиперплоскостей. Такое образование называетсямногогранным множеством. Многогранное множество всегда замкнуто и выпукло, но в частном случае может быть пустым или неограниченным, а размерность его может составлять n или менее. Рассмотрим примеры формирования допустимого множества для n=2, тогда все рассуждения будут рассматриваться на плоскости. Пример 1 
 Данная система решений не имеет (т.к. нет пересечений), следовательно, Х а =
Данная система решений не имеет (т.к. нет пересечений), следовательно, Х а = . Пример 2.
. Пример 2.  Данная система имеет решение в точке (3,0), следовательно, Х а =(3,0). Пример 3.
Данная система имеет решение в точке (3,0), следовательно, Х а =(3,0). Пример 3.  Областью допустимых значений Х а в данном случае является отрезок. Пример 4.
Областью допустимых значений Х а в данном случае является отрезок. Пример 4.  Областью допустимых значений Х а в данном случае является ограниченная область. Пример 5.
Областью допустимых значений Х а в данном случае является ограниченная область. Пример 5.  Областью допустимых значений Х а в данном случае является неограниченная область.
Областью допустимых значений Х а в данном случае является неограниченная область.
7. Типы решений
Если считать, что целевая функция задачи линейного программирования имеет вид f(x1, …, xn) = c1x1 + … + cnxn = C, то эта целевая функция представляет собой семейство параллельных гиперплоскостей в n-мерном пространстве. Если требуется максимизировать целевую функцию, то при графической задаче константа С увеличивается, пока гиперплоскость все еще будет пересекать допустимое множество, т.е.: Δf=(c1, …, cn) – градиент целевой функции.Если требуется минимизировать целевую функцию, то гиперплоскость надо сдвигать в направлении противоположном градиенту. Возможны следующие случаи:
- Задача не имеет решений

- Задача имеет единственное решение

- Задача имеет единственное решение

- Задача имеет множество решений

8. Понятие двойственной задачи
Если имеется задача линейного программирования на max: 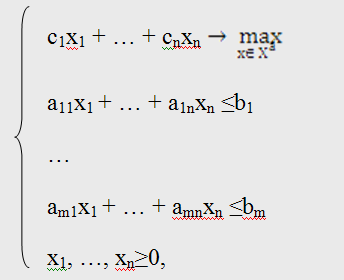 то механизм построения двойственной задачи заключается в следующем:
то механизм построения двойственной задачи заключается в следующем:  это двойственная задача. Связь прямой и двойственной задачи состоит в том, что решение одной из них может быть получено из решения другой. Теоретически доказано, что прямая и двойственная задача либо обе неразрешимы, либо обе имеют решение, причем значения целевых функций для оптимальных решений совпадают. На практике бывают случаи, когда решение двойственной задачи оказывается проще, чем прямой.
это двойственная задача. Связь прямой и двойственной задачи состоит в том, что решение одной из них может быть получено из решения другой. Теоретически доказано, что прямая и двойственная задача либо обе неразрешимы, либо обе имеют решение, причем значения целевых функций для оптимальных решений совпадают. На практике бывают случаи, когда решение двойственной задачи оказывается проще, чем прямой.
9. О методах решения задач линейного программирования

Для задач линейного программирования, особенно для типовых классов таких задач, разработано много специфических методов, причем эти методы часто связаны с решением двойственных задач. Однако, несмотря на специфику различных методов, практически все они реализуют общий метод решения задач линейного программирования, названный симплекс-методом (метод последовательного улучшения оценок). Он был предложен Данцингом в 1947 г. Геометрический метод состоит в следующем: пусть имеется n-переменных х1, …, хn и p-ограничений, p процесс регуляризации.
Теоретические основы поиска оптимального решения задачи линейного программирования.
ОДЗ – область допустимых значений. Теорема 1: если есть ОДЗ, то она всегда выпукла. Теорема 2: поиск оптимальных решений задачи следует осуществлять в вершинах ОДЗ.
Достоинства и недост лин. Моделей задачи планированияпроизв-ти.
1)Снижена трудоёмкость за счёт пренебрежения зависимостью коэф целевой ф-ции или части ограничений (парам моделей) от оптимизируемых величин.
2)прим-е для реш-я большого количества плановых задач, причём форма задач во многих случаях повторяется, задачи одного класса возникают в разл отраслях горпром-ти, сферах деят-ти гор предприятия
Графический метод решения задачи лп.
1)В принятой системе координат построить Ур-я всех ограничений, суммы которых даст многоугольник (многогор) ограничений.
2)Построить уравнение целевой функции, проходящее через нач корд.
3)Определить направление роста (убывания) целевой функции, перемещая прямую (пл-ть), соотв-щую целевой ф-ции, параллельно самой себе.
4)В соответствии с целью ЗЛП и направлением роста (убывания) целевой функции найти точку касания этой прямой (пл-ти) с многоугольником (многогр) ограничений – вершину многоуг-ка, имеющую мах отклонение от прямой (пл-ти), проходящей через начало корд.
Графическая интерпретация случая неограниченной целевой функции.
По определению множество называется неограниченным , если нельзя построить сферы конечного радиуса из какой либо точки множества , включающую все это множество. Графики неиграниченное множество представляющее собой незамкнутый многоугольник. Также для если рассмотреть подробнее , для того , чтобы показать , что для неограниченности множества решений достаточно наличие возможности бесконечного роста хотябы одной независимой переменной.
Случай несовместимости возникает тогда, когда общей области пересекающихся полуплоскостей или оно попадает в отриц. В этом случае гворят, что множество решений пустое.
- Анализ чувствительности линейных моделей к изменению значений параметров системы ограничений (постановка задачи).
- Анализ чувствительности линейных моделей к изменению значений параметров функции цели (постановка задачи)
- Транспортная задача ЛП
ТЗЛП заключается в определении объема перевозок от поставщиков к потребителям, если известны выпуск продукции у каждого поставщика и потребности потребителей; затраты на перемещение грузов от поставщиков к потребителям. План грузоперевозок для им.min затраты. Причем это могут быть затраты денежных средств, транспортных работ или перевозок.
Особенности транспортной задачи
1) Все ограничения имеют вид равенств
2) Каждая переменная входит всего 2 ограничения.
3) Коэффициент при переменных в ограничениях =1
Решение задач ТЗЛП включает 2 основных этапа построение опорного решения (начального плана перевозок) и построение оптимального решения.
Построение опорного решения. Оно может быть получено методами северо-западного угла, наименьших стоимостей и двойного предпочтения. Наиболее простым и легко формализуемым является метод северо-западного угла, однако он даёт обычно решение, далёкое от оптимального. При построении опорного решения методами наименьших стоимостей и двойного предпочтения анализируется матрица затрат и начальный план обычно близок к оптимальному. Метод с-з угла используется, как правило, при расчётах на ПК. При его применении данные о стоимостях не нужны.
Условия и метод построения оптимального решения транспортной задачи.
Один из наиболее простых и распространённых методов оптимизации транспортной задачи – метод потенциалов. Условия оптимальности плана транспортной задачи существует тогда, когда им соответствуют условия потенциальности оптимального плана транспортной задачи.
Условие потенциальности показывает, что разность потенциалов потребителя и поставщика = стоимости перевозки между ними, если перевозка осуществляется, и не больше стоимости перевозки при её отсутствии.
Алгоритм решения транспортной задачи методом потенциалов состоит из двух этапов: предварительного и общего. Первый включает: 1. построение опорного решения 2. присвоение и расчёт системы потенциалов 3. проверка первоначального плана на оптимальность. Если опорное решение не является оптимальным, то переходят ко второму (общему) этапу, который включает: 1. улучшение плана перевозок 2. исправление системы потенциалов 3. проверка улучшенного плана на оптимальность. Общий шаг циклически выполняется до получения оптимального плана перевозок.
Алгоритм решения транспортной задачи на сети. В ряде случаев транспортную задачу целесообразно решать в сетевой постановке, отличающейся наглядностью. Транспортная сеть это совокупность вершин или узлов (пункты отправления и приёма грузов, промежуточные пункты) и соединяющих их транспортных коммуникаций или звеньев. На каждом звене проставляются удельная стоимость перевозки груза по данному транспортному участку Сij , а при ограниченности пропускной способности звена также и её максимальное значение dij. Около каждой вершины в скобках со знаком + или – проставляются объемы отправления и приёма грузов. Соответственно.
Нахождение оптимального при сетевой постановке транспортной задачи плана осуществляется методом потенциалов: 1)Строится опорное решение 2) Для построения системы потенциалов любой вершине присваивается какой-л потенциал. 3)Проверка плана на оптимальность осуществляется для всех звеньев без грузопотока. 4) При улучшении плана по звену, на котором нарушено первое условие оптимальности (разность потенциалов потребителя и поставки = стоимости перевозки между ними), должна пройти перевозка; если нарушено 3е условие опт-ти (разность потенциалов потребителя и поставка должна быть больше стоимости перевозок по звену если по нему осуществляется перевозка, объёмом равной его пропускной способности), то на этом звене перевозка должна уменьшаться.
Постановка и решение ТЗ по критерию времени.
Иногда (перевозка возгорающихся полезных ископаемых, оперативное управление работой транспорта и др.) перевозку грузов от поставщиков i=1,n до потребителей j=1,m необходимо спланировать и организовать за минимальное время.
Решение ТЗ задачи по критерию времени осуществляется в следующем порядке. 1) Методом с-з угла или наименьшего элемента троится опорное решение ТЗ. 2)Из всех клеток, занятых перевозками, выбирается наибольшее время. 3) Клетки исходной матрицы, в которых время перевозки превышает максимальное для допустимого плана, зачёркиваются. 4)Улучшается допустимый план 5) Улучшение допустимого плана осуществляется до тех пор, пока полученный план не станет оптимальным