- Лабораторные / АТПП-3-Лабораторные / Метод параллельного программирования
- Метод последовательного программирования
- Области применения методов программирования схем переменных состояния
- Аналитический способ получения матрицы перехода
- Получение матрицы перехода разложением в ряд
- Получение матрицы перехода по схеме переменных состояния
- Схемы переменных состояний (спс)
- Метод прямого программирования (базовый)
- Методы последовательного и параллельного программирования
- Схемы переменных состояния типовых звеньев
- 6.2. Способы построения схем переменных состояния
- Метод прямого программирования
- Метод параллельного программирования
- Метод последовательного программирования
- Описание сау методом пространства состояния
- Схемы переменных состояний (спс)
- Метод прямого программирования
- Метод параллельного программирования
Лабораторные / АТПП-3-Лабораторные / Метод параллельного программирования

Применяется, если


Пример:

 ;
;  ;
; 
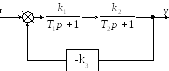
Метод последовательного программирования
Применяется, когда САУ представлена структурной схемой с использованием типовых звеньев. В этом случае каждое из типовых звеньев заменяется соответствующей ему схеме переменных состояния, построенной методом прямого программирования.
П ример:

Области применения методов программирования схем переменных состояния
Если САУ представлена передаточной функцией высокого порядка и не раскладывается на простые составляющие, то применяется метод прямого программирования.
Если САУ представлена структурной схемой, в которой м.б. выделены типовые звенья, то применяется метод последовательного программирования, кроме того метод последовательного программирования применяется в том случае, если для использования САУ необходимы не только выходные, но и промежуточные переменный.
Схема переменных состояния построенная методом последовательного программирования имеет наиболее ясный физический смысл.
Схема переменных состояния, построенная методом параллельного программирования применяется тогда, когда W(p) представлена в виде типовых передаточных функций. В этом случае матрица коэффициентов имеет наиболее простой вид, сто облегчает дальнейшее исследование САУ
Матрицы перехода
 ;
; 
Т – некоторое время (не постоянная времени)

Матрицу перехода можно получить тремя способами:
Аналитический способ получения матрицы перехода
 (1) Применим к уравнению (1) преобразование Лапласа:
(1) Применим к уравнению (1) преобразование Лапласа: 
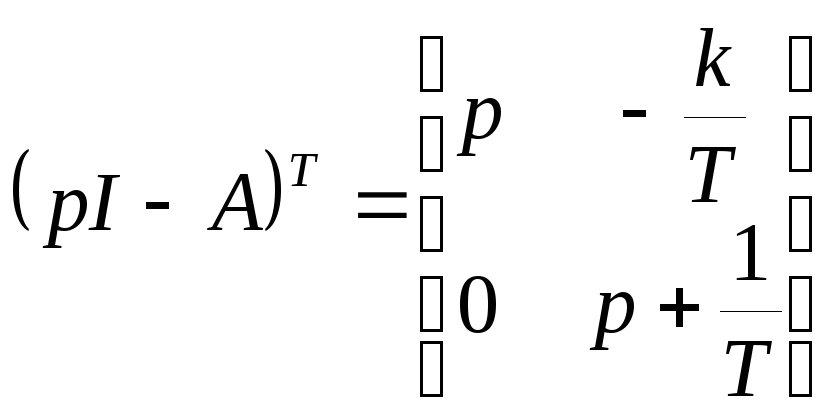
 , где
, где  — квадратная матрица;
— квадратная матрица;  — единичная матрица
— единичная матрица 

 Ф(Т)
Ф(Т)  Пример:
Пример: 

 ;
;  ;
;  ;
; 



Получение матрицы перехода разложением в ряд
Решением дифференциального уравнения (1) является: 
 Вычислять до тех пор, пока:
Вычислять до тех пор, пока: 
Получение матрицы перехода по схеме переменных состояния
 ,
, 
 Предположим, что
Предположим, что  ;
;  Элемент
Элемент  , матрицы перехода Ф определяется по схеме переменных состояния как реакция i-й переменной на ед. ступеньку, поданную на j-ю переменную при прочих нулевых начальных условиях. С точки зрения использования различных способов получения Ф(Т), предпочтение отдается аналитическому способу и способу разложения в ряд, при этом аналитический способ дает явную формулу определения матрицы перехода, что позволяет использовать данную матрицу при различных значениях. Если величина t является фиксированной, то удобнее использовать метод разложения в ряд, как наиболее экономичный
, матрицы перехода Ф определяется по схеме переменных состояния как реакция i-й переменной на ед. ступеньку, поданную на j-ю переменную при прочих нулевых начальных условиях. С точки зрения использования различных способов получения Ф(Т), предпочтение отдается аналитическому способу и способу разложения в ряд, при этом аналитический способ дает явную формулу определения матрицы перехода, что позволяет использовать данную матрицу при различных значениях. Если величина t является фиксированной, то удобнее использовать метод разложения в ряд, как наиболее экономичный
Схемы переменных состояний (спс)
Схемы переменных состояния состоят из следующих основных элементов:
- В основе СПС лежит единичный интегратор:

- Следующим основным элементом СПС является пропорциональное (безынерционное) звено:

- Сумматор.
Схемы переменных состояния строятся по передаточной функции объекта. Существует три способа построения схем состояния:
- метод прямого программирования (базовый);
- метод параллельного программирования;
- метод последовательного программирования.
Метод прямого программирования (базовый)
Используется, если описание САУ представлено в виде передаточной функции:  , пусть n=mАлгоритм построения СПС базовым методом.
, пусть n=mАлгоритм построения СПС базовым методом.
- Получаем преобразованную передаточную функцию: числитель и знаменатель исходной делим на
 в наивысшей степени, (переходя тем самым к отрицательным степеням), а также на коэффициентa0. СПС построить невозможно, если m > n.
в наивысшей степени, (переходя тем самым к отрицательным степеням), а также на коэффициентa0. СПС построить невозможно, если m > n.
 в наивысшей степени, (переходя тем самым к отрицательным степеням
в наивысшей степени, (переходя тем самым к отрицательным степеням ), а также на коэффициентa0. СПС построить невозможно, если m > n.
), а также на коэффициентa0. СПС построить невозможно, если m > n.
- Строим последовательную цепь из k единичных интеграторов, где k — максимальный модуль степени рчислителя преобразованной передаточной функции.

- Числитель преобразованной передаточной функции позволяет построить прямые линии связи. Выход каждого (того) интегратора умножается на соответствующий коэффициент (), затем получившиеся сигналы суммируются. Если коэффициент () = 0, то это говорит об отсутствии соответствующего сигнала. Количество слагаемых числителя преобразованной передаточной функции равно количеству сигналов, образующих выходной сигнал.
 того) интегратора умножается на соответствующий коэффициент (
того) интегратора умножается на соответствующий коэффициент ( ), затем получившиеся сигналы суммируются. Если коэффициент (
), затем получившиеся сигналы суммируются. Если коэффициент ( ) = 0, то это говорит об отсутствии соответствующего сигнала. Количество слагаемых числителя преобразованной передаточной функции равно количеству сигналов, образующих выходной сигнал.
) = 0, то это говорит об отсутствии соответствующего сигнала. Количество слагаемых числителя преобразованной передаточной функции равно количеству сигналов, образующих выходной сигнал. Коэффициент  соответствует сигналу ошибки. Еслиmn, то коэффициент, соответствующий сигналу ошибки будет равен нулю.
соответствует сигналу ошибки. Еслиmn, то коэффициент, соответствующий сигналу ошибки будет равен нулю. 
- Знаменатель преобразованной передаточной функции позволяет построить обратные линии связи (аналогично). Коэффициенты знаменателя со знаком (+) соответствуют отрицательным обратным связям и наоборот. Наличие единицы в знаменателе обязательно, но оно не отображается на СПС.
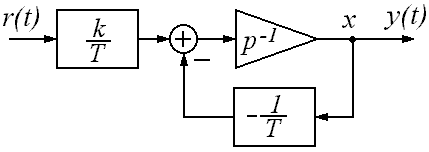
В методе пространства состояния (если нет иных оговорок) нумерация внутренних переменных идет с конца. Пример: Рассмотрим следующую передаточную функцию:  , преобразуем ее в
, преобразуем ее в 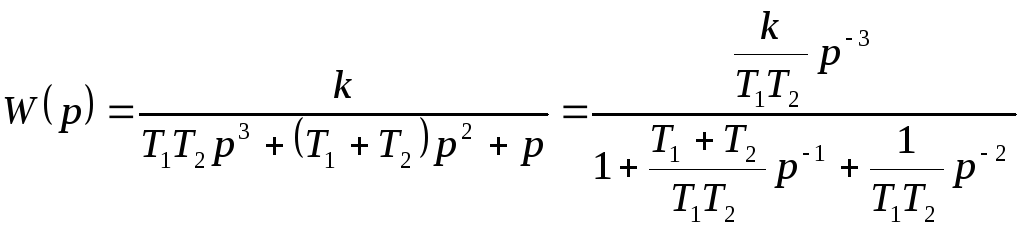 . По данным строим схему: П
. По данным строим схему: П  о данной схеме переменных состояния составим систему уравнений. Рассмотрим расширенный вектор:
о данной схеме переменных состояния составим систему уравнений. Рассмотрим расширенный вектор:  , выходной же вектор —
, выходной же вектор —  . Допустим, что r(t) – единичная ступенчатая функция, тогда система уравнений будет иметь вид:
. Допустим, что r(t) – единичная ступенчатая функция, тогда система уравнений будет иметь вид:  Для y(t) составим уравнение:
Для y(t) составим уравнение:  . Определяем матрицу коэффициентов:
. Определяем матрицу коэффициентов:  . Матрица выхода:
. Матрица выхода:  . Т.о., если записать в матричном виде, то получим уравнения:
. Т.о., если записать в матричном виде, то получим уравнения:  .
.
Методы последовательного и параллельного программирования
В этом случае исходная структурная схема представлена в виде соединений звеньев, либо передаточная функция представлена произведением (или суммой) передаточных функций простейших звеньев. В этом случае схема переменных состояния получается путем последовательного построения СПС для каждого из звеньев (базовым методом). Пример:  Схема состояния будет выглядеть следующим образом: С
Схема состояния будет выглядеть следующим образом: С  оставим систему уравнений:
оставим систему уравнений:  Т.о. матрица коэффициентов А имеет следующий вид:
Т.о. матрица коэффициентов А имеет следующий вид: 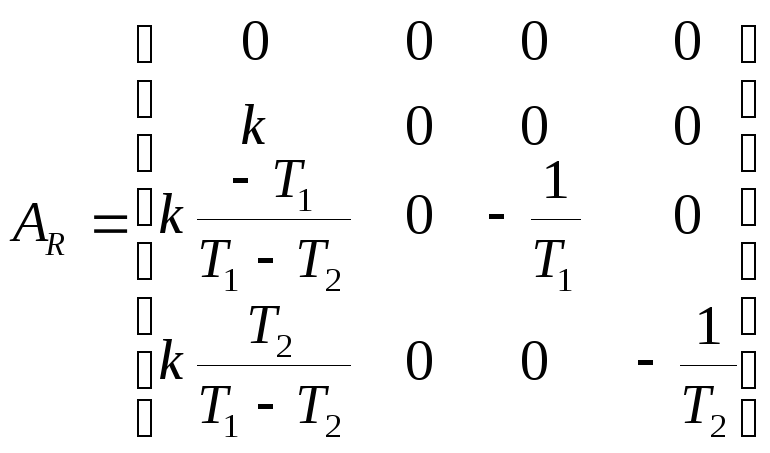 ; а матрица
; а матрица  .
.
Схемы переменных состояния типовых звеньев
- Апериодическоезвено:
 Схема состояния такого звена имеет вид:
Схема состояния такого звена имеет вид: 
- Колебательноезвено:
 Ему соответствует схема состояния следующего вида:
Ему соответствует схема состояния следующего вида: 
- Идеальное интегрирующеезвено:
 Схема состояния:
Схема состояния: 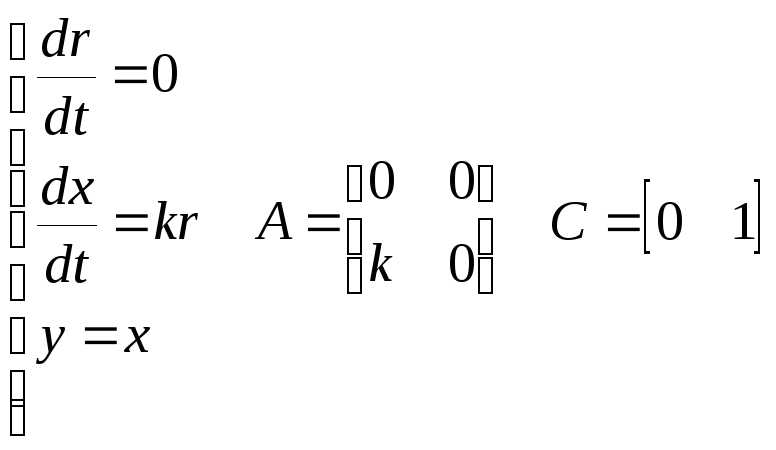

- Идеальное дифференцирующеезвено:
 Схема состояния идеального дифференцирующего звена не существует.
Схема состояния идеального дифференцирующего звена не существует.
- Реальное дифференцирующеезвено:
 Схема состояния имеет вид:
Схема состояния имеет вид: 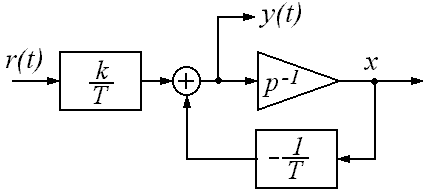
- Изодромноезвено:
 Схема состояния:
Схема состояния: 

 Построим схему из предыдущего примера методом последовательного программирования:
Построим схему из предыдущего примера методом последовательного программирования: 

6.2. Способы построения схем переменных состояния
X (1) (t)= , X (2) (t)=
, X (2) (t)= ,…,
,…,
таких, что каждая из них описывает состояние полностью, причем любые два вектора X (i) (t) и X (j) (t) из этого множества будут однозначно связаны между собой. Удачный выбор переменных состояния часто приводит к существенному упрощению математического описания САУ.
Естественным является стремление выбрать в качестве составляющих вектора состояния контролируемые выходные сигналы системы, характеризующие качество процесса управления, но их обычно бывает недостаточно для полного математического описания САУ. Выбор вектора переменных состояния осуществляется одним из следующих трех способов, называемых методами программирования:
Метод прямого программирования
Пусть передаточная функция системы имеет вид:  . (6.9) Разделив числитель и знаменатель W (р> на
. (6.9) Разделив числитель и знаменатель W (р> на  , получим:
, получим:  . Выходной сигнал системы равен:
. Выходной сигнал системы равен:  . Введем в рассмотрение фиктивную переменную
. Введем в рассмотрение фиктивную переменную  , равную:
, равную:  . Преобразуем последнее выражение к виду:
. Преобразуем последнее выражение к виду: 

 . (6.10) Тогда выходной сигнал системы может быть выражен следующим образом:
. (6.10) Тогда выходной сигнал системы может быть выражен следующим образом: 
 . (6.11) На основании выражений (6.10) и (6.11) составим структурную схему системы (рис. 6.2) с передаточной функцией (6.9), содержащую только пропорциональные звенья и
. (6.11) На основании выражений (6.10) и (6.11) составим структурную схему системы (рис. 6.2) с передаточной функцией (6.9), содержащую только пропорциональные звенья и  последовательно соединенных интегрирующих звеньев. О
последовательно соединенных интегрирующих звеньев. О чевидно, что в качестве переменных состояния, полностью описывающих поведение такой системы, могут быть выбраны выходные сигналы интегрирующих звеньев: X(t) =
чевидно, что в качестве переменных состояния, полностью описывающих поведение такой системы, могут быть выбраны выходные сигналы интегрирующих звеньев: X(t) =  . Особый интерес представляют схемы переменных состояния простейших звеньев (рис. 6.3) с передаточными функциями вида: а)
. Особый интерес представляют схемы переменных состояния простейших звеньев (рис. 6.3) с передаточными функциями вида: а)  ; б)
; б)  ; в)
; в)  ; г
; г )
) .
.
Метод параллельного программирования
Для построения схем переменных состояния способом параллельного программирования передаточная функция системы (6.9), имеющая в общем случае  действительных и
действительных и пар комплексно-сопряженных полюсов (
пар комплексно-сопряженных полюсов ( ), предварительно должна быть разложена на сумму простейших дробей, т.е. представлена в виде:
), предварительно должна быть разложена на сумму простейших дробей, т.е. представлена в виде:  , (6.12) где
, (6.12) где  коэффициенты разложения. Затем для каждого из слагаемых в выражении (6.12) составляется схема переменных состояния, например, с использованием метода прямого программирования. Далее все (q+ z + 1) таких схем соединяются между собой параллельно. Схема переменных состояния, соответствующая выражению (6.12), представлена на рис. 6.4. Так же, как и в предыдущем случае, переменными состояния являются выходные величины интеграторов.
коэффициенты разложения. Затем для каждого из слагаемых в выражении (6.12) составляется схема переменных состояния, например, с использованием метода прямого программирования. Далее все (q+ z + 1) таких схем соединяются между собой параллельно. Схема переменных состояния, соответствующая выражению (6.12), представлена на рис. 6.4. Так же, как и в предыдущем случае, переменными состояния являются выходные величины интеграторов. 
Метод последовательного программирования
Для построения схем переменных состояния способом последовательного программирования передаточная функция (6.9) в зависимости от числа и вида ее нулей и полюсов должна быть представлена в виде последовательного соединения элементарных звеньев с передаточными функциями вида:  ;
;  ;
; ;
;  ;
;  . В качестве переменных состояния также выбираются выходные величины интегрирующих звеньев, выходной сигнал системы
. В качестве переменных состояния также выбираются выходные величины интегрирующих звеньев, выходной сигнал системы  в этом случае обычно совпадает с переменной состояния последнего звена. В качестве примера рассмотрим описание в пространстве состояния системы (рис. 6.5). Н
в этом случае обычно совпадает с переменной состояния последнего звена. В качестве примера рассмотрим описание в пространстве состояния системы (рис. 6.5). Н а основании метода последовательного программирования составим схему переменных состояния этой системы (рис. 6.6). П
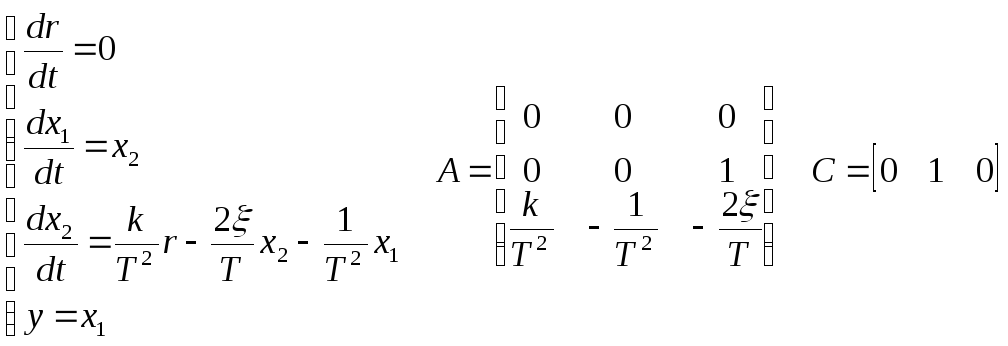
а основании метода последовательного программирования составим схему переменных состояния этой системы (рис. 6.6). П оскольку в качестве переменных состояния выбираются выходные величины интегрирующих звеньев, производные по времени этих переменных состояния представляют собой входные сигналы соответствующих интеграторов. При этом система дифференциальных уравнений (6.2) для рассматриваемой САУ имеет следующий вид:
оскольку в качестве переменных состояния выбираются выходные величины интегрирующих звеньев, производные по времени этих переменных состояния представляют собой входные сигналы соответствующих интеграторов. При этом система дифференциальных уравнений (6.2) для рассматриваемой САУ имеет следующий вид:  (6.13) Кроме того,
(6.13) Кроме того,  или
или  . (6.14) Тогда выражения (6.13) и (6.14) в матричной форме примут вид:
. (6.14) Тогда выражения (6.13) и (6.14) в матричной форме примут вид: 


 и
и  , т.е. для рассматриваемой САУ:
, т.е. для рассматриваемой САУ:  матрица системы A =
матрица системы A =  , матрица управленияB =
, матрица управленияB =  и матрица наблюдения
и матрица наблюдения  .
.
Описание сау методом пространства состояния
Состоянием САУ называется та минимальная информация об объекте, которая позволяет спрогнозировать поведение системы в будущем при известных задающих воздействиях.
С точки зрения ТАУ, объект представляет собой черный ящик, характеризующийся рядом координат.

остояние объекта в любой момент времени определяется тремя векторными пространствами:
- Векторное пространство входа определяет входные воздействия на объект.
- Векторное пространство внутреннего состояния определяет реакцию системы на входное воздействие.
- Векторное пространство выхода определяется выходными переменными.
 определяет входные воздействия на объект.
определяет входные воздействия на объект. определяет реакцию системы на входное воздействие.
определяет реакцию системы на входное воздействие. определяется выходными переменными.
определяется выходными переменными. Совокупность этих векторов определяет состояние системы (пространства состояния). Для непрерывных линейных систем динамика и статика объекта описываются следующими уравнениями:  где A* — матрица коэффициентов САУ; B* — матрица управления САУ; C* — матрица выхода САУ; D* — матрица обхода САУ. Данное описание позволяет представить все стороны САУ:
где A* — матрица коэффициентов САУ; B* — матрица управления САУ; C* — матрица выхода САУ; D* — матрица обхода САУ. Данное описание позволяет представить все стороны САУ:
- Первое уравнение описывает динамику САУ;
- Второе уравнение описывает статику САУ.
На практике бывает удобней объединить вектор входа и внутреннего состояния в один:  — обобщенный вектор состояния. В итоге получим систему уравнений:
— обобщенный вектор состояния. В итоге получим систему уравнений:  Тогда систему (*) можно представить в виде:
Тогда систему (*) можно представить в виде:  В пространстве состояния в качестве графического изображения системы предлагают схемы переменных состояний.
В пространстве состояния в качестве графического изображения системы предлагают схемы переменных состояний.
Схемы переменных состояний (спс)

В основе СПС лежит единичный интегратор: С хемы переменных состояния строятся по передаточной функции объекта. Существует три способа построения схем состояния:
- метод прямого программирования;
- метод параллельного программирования;
- метод последовательного программирования.
Метод прямого программирования
Используется, если описание САУ представлено в виде передаточной функции:  Числитель и знаменатель делим на коэффициент b0, что позволяет определить знаменатель, как цепь обратных связей:
Числитель и знаменатель делим на коэффициент b0, что позволяет определить знаменатель, как цепь обратных связей:  С
С  хема переменных состояния строится с последовательной цепочки единичных интеграторов. Количество интеграторов равноп. Далее определяется обратная цепь по знаменателю преобразованной передаточной функции. В методе пространства состояния (если нет иных оговорок) нумерация внутренних переменных идет с конца. Пример: Рассмотрим следующую передаточную функцию:
хема переменных состояния строится с последовательной цепочки единичных интеграторов. Количество интеграторов равноп. Далее определяется обратная цепь по знаменателю преобразованной передаточной функции. В методе пространства состояния (если нет иных оговорок) нумерация внутренних переменных идет с конца. Пример: Рассмотрим следующую передаточную функцию:  , преобразуем ее в
, преобразуем ее в  . По данным строим схему: П
. По данным строим схему: П  о данной схеме переменных состояния составим систему уравнений. Рассмотрим расширенный вектор:
о данной схеме переменных состояния составим систему уравнений. Рассмотрим расширенный вектор:  , выходной же вектор —
, выходной же вектор —  . Допустим, что r(t) – единичная ступенчатая функция, тогда система уравнений будет иметь вид:
. Допустим, что r(t) – единичная ступенчатая функция, тогда система уравнений будет иметь вид:  Для y(t) составим уравнение:
Для y(t) составим уравнение:  . Определяем матрицу коэффициентов:
. Определяем матрицу коэффициентов:  . Матрица выхода:
. Матрица выхода:  . Т.о., если записать в матричном виде, то получим уравнения:
. Т.о., если записать в матричном виде, то получим уравнения: 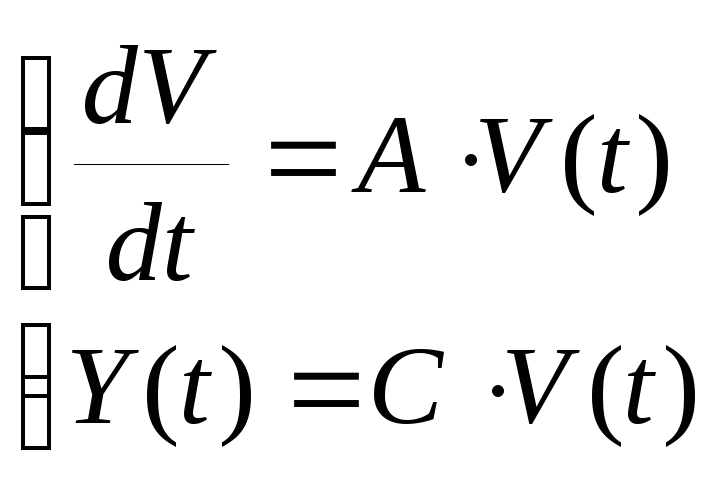 .
.
Метод параллельного программирования
Передаточная функция предварительно разбивается на сумму следующих дробей:  , при этом s+d=n – порядку системы; i – это действительные полюса передаточной функции W(p); j, j – определяют комплексные полюса передаточной функции W(p). Строим структурную схему: П
, при этом s+d=n – порядку системы; i – это действительные полюса передаточной функции W(p); j, j – определяют комплексные полюса передаточной функции W(p). Строим структурную схему: П  ример:
ример:  Схема состояния будет выглядеть следующим образом: С
Схема состояния будет выглядеть следующим образом: С  оставим систему уравнений:
оставим систему уравнений:  Т.о. матрица коэффициентов А имеет следующий вид:
Т.о. матрица коэффициентов А имеет следующий вид: 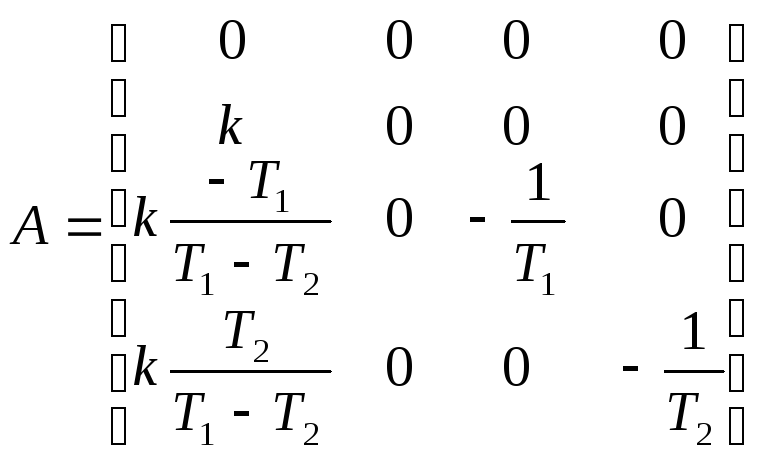 ; а матрица
; а матрица  .
.