Геометрическая интерпретация и графическое решение задачи линейного программирования
Геометрическая интерпретация задач дает возможность наглядно представить их структуру, выявить особенности. Задачу линейного программирования с двумя переменными всегда можно решить графически. Однако уже в трехмерном пространстве такое решение усложняется, а в пространствах, размерность которых больше трех, графическое решение, вообще говоря, невозможно.
Рассмотрим случай двух переменных:
Дадим геометрическую интерпретацию элементов этой задачи.
Каждое из ограничений (6), (7) задаёт на плоскости x1Ox2 некоторую полуплоскость. Полуплоскость – выпуклое множество. Напомним, что выпуклым называют множество, которое вместе с любыми своими точками x1 и x2 содержит и все точки отрезка [ x1; x2 ]. Пересечение любого числа выпуклых множеств является выпуклым множеством. Отсюда следует, что область допустимых решений (ОДР) задачи есть выпуклое множество.
Возможны ситуации, когда область допустимых решений ЗЛП:
— неограниченная выпуклая многоугольная область;
Геометрическая интерпретация целевой функции.
Пусть ОДР задачи ЛП – непустое множество.
Выберем произвольное значение целевой функции , получим . Это уравнение прямой линии. В точках прямой целевая функция сохраняет одно и то же постоянное значение . Считая в равенстве параметром, получим уравнение семейства параллельных прямых, называемых линиями уровня целевой функции. Найдем частные производные целевой функции по x1 и x2: .
Частная производная функции показывает скорость её возрастания вдоль данной оси. с1 и с2 – скорости возрастания соответственно вдоль осей Ox1 и Ox2. Вектор называется градиентом функции. Он показывает направление наискорейшего возрастания целевой функции. Вектор указывает направление наискорейшего убывания целевой функции Его называют антиградиентом.
Вектор перпендикулярен к прямой семейства .
Из геометрической интерпретации элементов ЗЛП вытекает следующий порядок её графического решения.
1. С учетом системы ограничений строится область допустимых решений.
3. Проводится произвольная линия, перпендикулярная к вектору .
4. При решении задачи на максимум перемещается линия уровня в направлении вектора так, чтобы она касалась области допустимых решений в ее крайнем положении.
В случае задачи на минимум линия уровня перемещается в антиградиентном направлении.
5. Определяется оптимальный план и экстремальное значение целевой функции .
Возможны следующие случаи:
— оптимальный план единственный;
— оптимальных планов бесконечное множество: в разрешающем положении линия уровня проходит через сторону области допустимых решений;
— целевая функция неограниченна;
— область допустимых решений состоит из единственной точки, где целевая функция достигает одновременно и максимального и минимального значения;
— задача не имеет решения: ОДР – пустое множество, т.е. система ограничений задачи несовместна.
Пример. Пусть предприятие изготавливает изделия двух видов А и В. Для производства изделий оно располагает сырьевыми ресурсами 3-х видов С, D и E в объёмах 600, 480 и 240 единиц соответственно. Нормы расхода ресурсов на единицу продукции каждого вида известны и даны в таблице 1. Прибыль от реализации изделия А составляет 40 млн. руб., а изделия В- 50 млн. руб. Требуется найти объёмы производства изделий, обеспечивающие максимальную прибыль.
Решение. Построим математическую модель задачи.
Ограничения будут иметь вид:
Решение сформулированной задачи найдем, используя геометрическую интерпретацию. Определим сначала многоугольник решений, для чего систему ограничений-неравенств запишем в виде уравнений и пронумеруем их:
Каждое из записанных уравнений представляет собой прямую на плоскости, причем 4-я и 5-я прямые являются координатными осями.
Чтобы построить первую прямую, найдем точки её пересечения с осями координат: при x1 = 0, х2 = 75, а при х2 = 0, x1 = 25. Далее нас интересует, по какую сторону от прямой будет находиться полуплоскость, соответствующая первому неравенству. Чтобы определить искомую полуплоскость, возьмем точку 0(0,0) и подставим ее координаты в неравенство — оно удовлетворяется. Так как точка 0(0,0) лежит левее первой прямой, то и полуплоскость будет находиться левее прямой 24 х1 + 8 х2 = 600. На рис. 1 расположение полуплоскости относительно первой прямой отмечено стрелками.
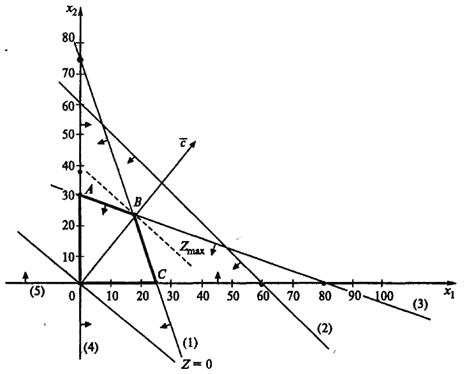
Аналогично построены 2-я и 3-я прямые и найдены полуплоскости, соответствующие 2-му и 3-му неравенствам. Точки, удовлетворяющие ограничениям х1, ³ 0, х2 ³ 0, находятся в первом квадранте.
Множество точек, удовлетворяющих всем ограничениям одновременно, является ОДР системы ограничений. На графике (рис. 1) это многоугольник ОАВС.
Любая точка многоугольника решений удовлетворяет системе ограничений задачи и, следовательно, является ее решением. Это говорит о том, что данная задача линейной оптимизации имеет множество допустимых решений, т.е. многовариантна. Нам же необходимо найти решение, обеспечивающее максимальную прибыль.
Приравняем функцию к нулю и построим соответствующую прямую. Вектор-градиент прямой функции 40 х1 + 50 х2 = 0 имеет координаты . Изобразим вектор на графике и построим прямую перпендикулярно этому вектору (рис. 1). Перемещая прямую функции параллельно самой себе в направлении вектора, увидим, что последней точкой многоугольника решений, которую пересечет прямая функции, является угловая точка В. Следовательно, в точке В функция достигает максимального значения.
Координаты точки В найдем, решая систему уравнений, прямые которых пересекаются в данной точке:
Решив эту систему, получим, что х1 = 17,14; х2 = 23, 57. Следовательно, если предприятие изготовит изделия в найденных объемах, то получит максимальную прибыль, равную
Zmax = 40×17,14 + 50×23,57 = 1 864,1(млн. руб.).
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями:
1. Геометрическая интерпретация задач линейного программирования
Для понимания всего дальнейшего полезно знать и представлять себе геометрическую интерпретацию задач линейного программирования, которую можно дать для случаев n =2 и n =3.
Наиболее наглядна эта интерпретация для случая n =2, т.е. для случая двух переменных  и
и . Пусть нам задана задача линейного программирования в стандартной форме
. Пусть нам задана задача линейного программирования в стандартной форме


Возьмём на плоскости декартову систему координат и каждой паре чисел поставим в соответствие точку на этой плоскости.
Обратим прежде всего внимание на ограничения  и
и . Они из всей плоскости вырезают лишь её первую четверть (см. рис. 1). Рассмотрим теперь, какие области соответствуют неравенствам вида
. Они из всей плоскости вырезают лишь её первую четверть (см. рис. 1). Рассмотрим теперь, какие области соответствуют неравенствам вида . Сначала рассмотрим область, соответствующую равенству
. Сначала рассмотрим область, соответствующую равенству . Это прямая линия. Строить её проще всего по двум точкам.
. Это прямая линия. Строить её проще всего по двум точкам.
Пусть  . Если взять
. Если взять , то получится
, то получится . Если взять
. Если взять , то получится
, то получится . Таким образом, на прямой лежат две точки
. Таким образом, на прямой лежат две точки и
и . Дальше через эти две точки можно по линейке провести прямую линию (см. рисунок 2).
. Дальше через эти две точки можно по линейке провести прямую линию (см. рисунок 2).

Если же b=0, то на прямой лежит точка (0,0). Чтобы найти другую точку, можно взять любое отличное от нуля значение  и вычислить соответствующее ему значение
и вычислить соответствующее ему значение .
.
Эта построенная прямая разбивает всю плоскость на две полуплоскости. В одной её части  , а в другой наоборот
, а в другой наоборот . Узнать, в какой полуплоскости какой знак имеет место проще всего посмотрев, какому неравенству удовлетворяет какая-то точка плоскости, например, начало координат, т.е. точка (0,0).
. Узнать, в какой полуплоскости какой знак имеет место проще всего посмотрев, какому неравенству удовлетворяет какая-то точка плоскости, например, начало координат, т.е. точка (0,0).
Рассмотрим задачу ЛП в стандартной форме записи:
max f(X) = с1х1 + с2х2 + . + спхп (*)
а11х1 + а12х2 + … + а1nхn ≤ b1
а21х1 + а22х2 + … + а2nхn ≤ b2
аm1х1 + аm2х2 + … + аmnхn ≤ bm
хj ≥ 0, j = 1, 2, …, n.
Рассмотрим эту задачу на плоскости, т.е. при п = 2. Пусть система неравенств (**), (***) совместна (имеет хотя бы одно решение):
а11х1 + а12х2 ≤ b1
а21х1 + а22х2 ≤ b2
аm1х1 + аm2х2 ≤ bm
x1 ≥ 0; х2 ≥ 0.
Каждое неравенство этой системы геометрически определяет полуплоскость с граничной прямой аi1х1 + аi2х2 ≤ bi i = 1, m. Условия неотрицательности определяют полуплоскости соответственно с граничными прямыми x1 = 0; х2 = 0.. Система совместна, поэтому полуплоскости, как выпуклые множества, пересекаясь, образуют общую часть, которая является выпуклым множеством и представляет собой совокупность точек, координаты каждой из которых составляют решение данной системы. Совокупность этих точек называют многоугольником решений. Это может быть точка, отрезок, луч, замкнутый многоугольник, неограниченная многоугольная область.
Если в системе ограничений (**) — (***) n = 3, то каждое неравенство геометрически представляет полупространство трехмерного пространства, граничная плоскость которого аi1х1 + аi2х2 + аi3х1 ≤ bi, а условия неотрицательности — полупространства с граничными плоскостями соответственно xi = 0 (i = 1, 2, 3). Если система ограничений совместна, то эти полупространства, как выпуклые множества, пересекаясь, образуют в трехмерном пространстве общую часть, которая называется многогранником решений.
Пусть в системе (**) — (***) п > 3, тогда каждое неравенство определяет полупространство n-мерного пространства с граничной гиперплоскостью аi1х1 + аi2х2 + … + аinхn ≤ bi i = 1, т , а условия неотрицательности — полупространства с граничными гиперплоскостями xj = 0, j = 1, n.
Если система ограничений совместна, то по аналогии с трехмерным пространством она образует общую часть n-мерного пространства, называемую многогранником решений, так как координаты каждой его точки являются решением.
Таким образом, геометрически задача линейного программирования представляет собой отыскание такой точки многогранника решений, координаты которой доставляют линейной функции минимальное значение, причем допустимыми решениями служат все точки многогранника решений.
Графический метод основан на геометрической интерпретации задачи линейного программирования и применяется в основном при решении задач двумерного пространства и только некоторых задач трехмерного пространства, так как довольно трудно построить многогранник решений, который образуется в результате пересечения полупространств. Задачу пространства размерности больше трех изобразить графически вообще невозможно.
Пусть задача линейного программирования задана в двумерном пространстве, т. е. ограничения содержат две переменные.
Если в ЗЛП ограничения заданы в виде неравенств с двумя переменными, она может быть решена графически. Графический метод решения ЗЛП состоит из следующих этапов.
Сначала на координатной плоскости x1Ox2 строится допустимая многоугольная область (область допустимых решений, область определения), соответствующая ограничениям:
Не приводя строгих доказательств, укажем те случаи, которые тут могут получиться.
- Основной случай — получающаяся область имеет вид ограниченного выпуклого многоугольника (рис. 3а)).
- Неосновной случай получается неограниченный выпуклый многоугольник, имеющий вид, подобный изображенному на рис. 3.б. Подобная ситуация, например, получится, если в рассмотренном выше примере убрать ограничение
 . Оставшаяся часть будет неограниченным выпуклым многоугольником.
. Оставшаяся часть будет неограниченным выпуклым многоугольником.
 . Оставшаяся часть будет неограниченным выпуклым многоугольником.
. Оставшаяся часть будет неограниченным выпуклым многоугольником.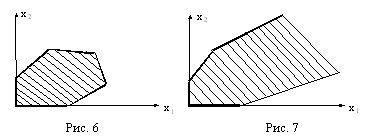 а)б)Рис. 3Рис. 3 Наконец, возможен случай, когда неравенства противоречат друг другу, и допустимая область вообще пуста. Рассмотрим теорию на конкретном примере: Найти допустимую область задачи линейного программирования, определяемую ограничениями
а)б)Рис. 3Рис. 3 Наконец, возможен случай, когда неравенства противоречат друг другу, и допустимая область вообще пуста. Рассмотрим теорию на конкретном примере: Найти допустимую область задачи линейного программирования, определяемую ограничениями
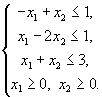 | (3) |
 Решение:
Решение:
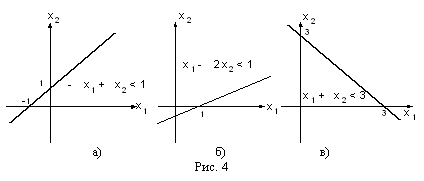
- Рассмотрим прямую . При, а при. Таким образом, эта прямая проходит через точки (0,1) и (-1,0). Беряполучим, что -0+0
- Рассмотрим прямую . При, а при . Таким образом, эта прямая проходит через точки (0, -1/2) и (1,0). так как(4.б).
- Наконец, рассмотрим прямую. Она проходит через точки (0,3) и (3,0) и так как 0+0
 . При
. При , а при
, а при . Таким образом, эта прямая проходит через точки (0,1) и (-1,0). Беря
. Таким образом, эта прямая проходит через точки (0,1) и (-1,0). Беря получим, что -0+0
получим, что -0+0  . При
. При , а при . Таким образом, эта прямая проходит через точки (0, -1/2) и (1,0). так как
, а при . Таким образом, эта прямая проходит через точки (0, -1/2) и (1,0). так как (4.б).
(4.б). м прямую
м прямую . Она проходит через точки (0,3) и (3,0) и так как 0+0
. Она проходит через точки (0,3) и (3,0) и так как 0+0 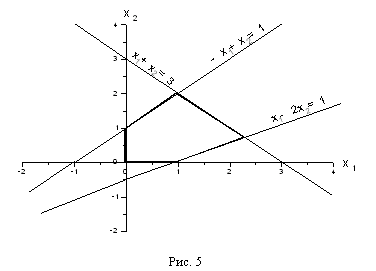 Сводя все вместе и добавляя условия
Сводя все вместе и добавляя условия  получим рисунок 5, где выделена область, в которой выполняются одновременно все ограничения. Обратите внимание на то, что получившаяся область имеет видвыпуклого многоугольника. Этап 2. Вернёмся теперь к исходной задаче линейного программирования. В ней, кроме системы неравенств, есть еще целевая функция
получим рисунок 5, где выделена область, в которой выполняются одновременно все ограничения. Обратите внимание на то, что получившаяся область имеет видвыпуклого многоугольника. Этап 2. Вернёмся теперь к исходной задаче линейного программирования. В ней, кроме системы неравенств, есть еще целевая функция  .
. 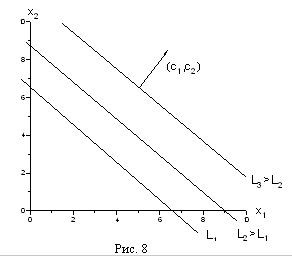 Рис.6 Рассмотрим прямую
Рис.6 Рассмотрим прямую . Будем увеличивать L. Что будет происходить с нашей прямой? Легко догадаться, что прямая будет двигаться параллельно самой себе в том направлении, которое дается вектором
. Будем увеличивать L. Что будет происходить с нашей прямой? Легко догадаться, что прямая будет двигаться параллельно самой себе в том направлении, которое дается вектором  , так как это вектор нормали к нашей прямой и одновременно вектор градиента функции
, так как это вектор нормали к нашей прямой и одновременно вектор градиента функции . А теперь сведем всё вместе. Итак, надо решить задачу
. А теперь сведем всё вместе. Итак, надо решить задачу 
 Oграничения задачи вырезают на плоскости некоторый многоугольник. Пусть при некотором L прямая
Oграничения задачи вырезают на плоскости некоторый многоугольник. Пусть при некотором L прямая  пересекаетдопустимую область. Это пересечение дает какие-то значения переменных
пересекаетдопустимую область. Это пересечение дает какие-то значения переменных  , которые являются планами. Этап 3 Увеличивая L мы начнем двигать нашу прямую и её пересечение с допустимой областью будет изменяться (см. рис. 7). В конце концов эта прямая выйдет награницу допустимой области как правило, это будет одна из вершин многоугольника. Дальнейшее увеличение L приведёт к тому, что пересечение прямой
, которые являются планами. Этап 3 Увеличивая L мы начнем двигать нашу прямую и её пересечение с допустимой областью будет изменяться (см. рис. 7). В конце концов эта прямая выйдет награницу допустимой области как правило, это будет одна из вершин многоугольника. Дальнейшее увеличение L приведёт к тому, что пересечение прямой  с допустимой областью будет пустым. Поэтому то положение прямой
с допустимой областью будет пустым. Поэтому то положение прямой , при котором она вышла на граничную точку допустимой области, и даст решение задачи, а соответствующее значениеL и будет оптимальным значением целевой функции.
, при котором она вышла на граничную точку допустимой области, и даст решение задачи, а соответствующее значениеL и будет оптимальным значением целевой функции. 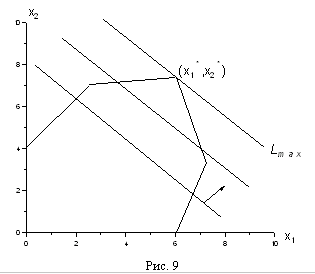 Рис.7
Рис.7